 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCALAR: Simultaneous Calibration of 2D Laser and Robot Kinematic Parameters Using Planarity and Distance Constraints
May 18, 2019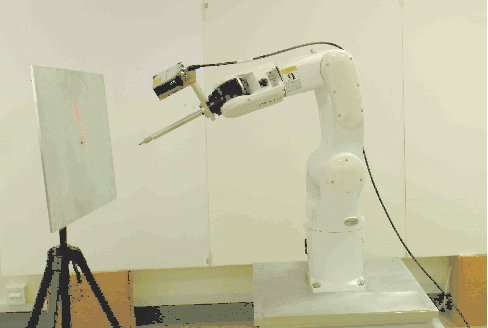
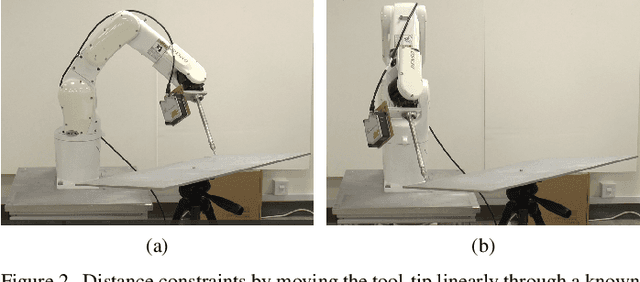


In this paper, we propose SCALAR, a calibration method to simultaneously calibrate the kinematic parameters of a 6-DoF robot and the extrinsic parameters of a 2D Laser Range Finder (LRF) attached to the robot's flange. The calibration setup requires only a flat plate with two small holes carved on it at a known distance from each other, and a sharp tool-tip attached to the robot's flange. The calibration is formulated as a nonlinear optimization problem where the laser and the tool-tip are used to provide planar and distance constraints, and the optimization problem is solved using Levenberg-Marquardt algorithm. We demonstrate through experiments that SCALAR can reduce the mean and the maximum tool position error from 0.44 mm to 0.19 mm and from 1.41 mm to 0.50 mm, respectively.
RoboTSP - A Fast Solution to the Robotic Task Sequencing Problem
Oct 05, 2017
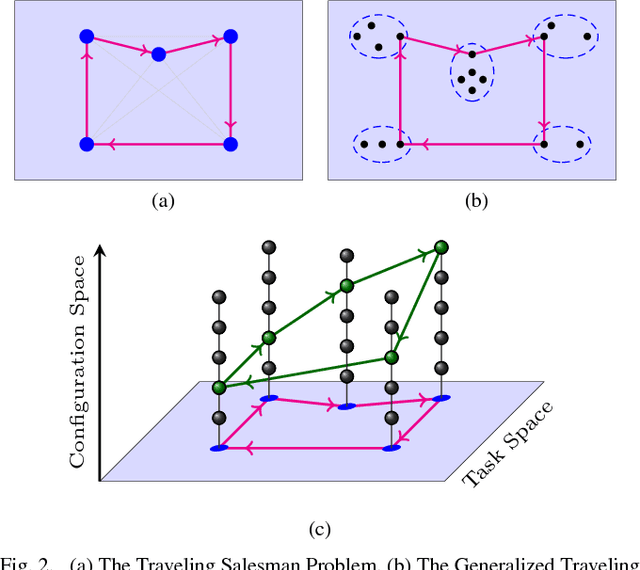
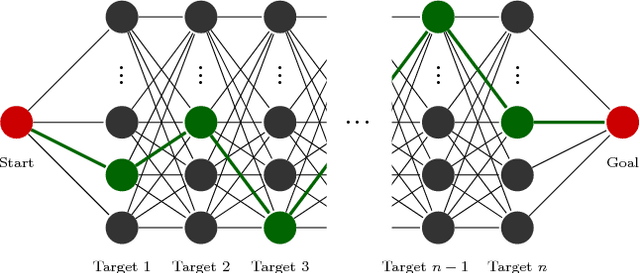

In many industrial robotics applications, such as spot-welding, spray-painting or drilling, the robot is required to visit successively multiple targets. The robot travel time among the targets is a significant component of the overall execution time. This travel time is in turn greatly affected by the order of visit of the targets, and by the robot configurations used to reach each target. Therefore, it is crucial to optimize these two elements, a problem known in the literature as the Robotic Task Sequencing Problem (RTSP). Our contribution in this paper is two-fold. First, we propose a fast, near-optimal, algorithm to solve RTSP. The key to our approach is to exploit the classical distinction between task space and configuration space, which, surprisingly, has been so far overlooked in the RTSP literature. Second, we provide an open-source implementation of the above algorithm, which has been carefully benchmarked to yield an efficient, ready-to-use, software solution. We discuss the relationship between RTSP and other Traveling Salesman Problem (TSP) variants, such as the Generalized Traveling Salesman Problem (GTSP), and show experimentally that our method finds motion sequences of the same quality but using several orders of magnitude less computation time than existing approaches.
A Framework for Fine Robotic Assembly
Sep 16, 2015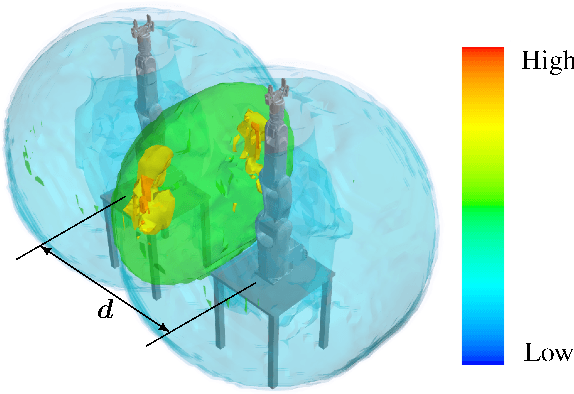
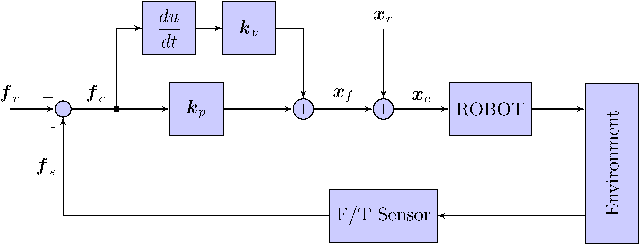

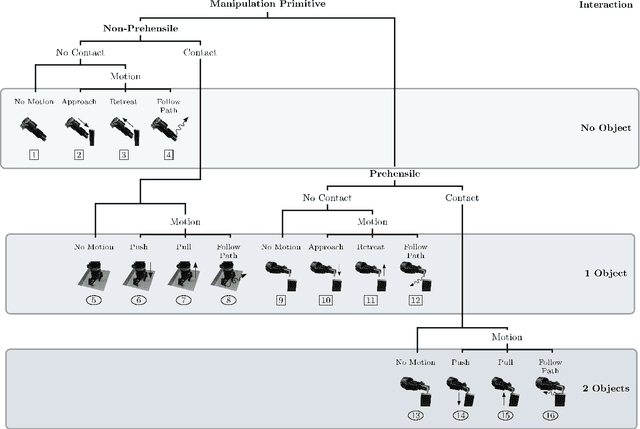
Fine robotic assembly, in which the parts to be assembled are small and fragile and lie in an unstructured environment, is still out of reach of today's industrial robots. The main difficulties arise in the precise localization of the parts in an unstructured environment and the control of contact interactions. Our contribution in this paper is twofold. First, we propose a taxonomy of the manipulation primitives that are specifically involved in fine assembly. Such a taxonomy is crucial for designing a scalable robotic system (both hardware and software) given the complexity of real-world assembly tasks. Second, we present a hardware and software architecture where we have addressed, in an integrated way, a number of issues arising in fine assembly, such as workspace optimization, external wrench compensation, position-based force control, etc. Finally, we show the above taxonomy and architecture in action on a highly dexterous task -- bimanual pin insertion -- which is one of the key steps in our long term project, the autonomous assembly of an IKEA chair.