 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCALAR: Simultaneous Calibration of 2D Laser and Robot Kinematic Parameters Using Planarity and Distance Constraints
Paper and Code
May 18, 2019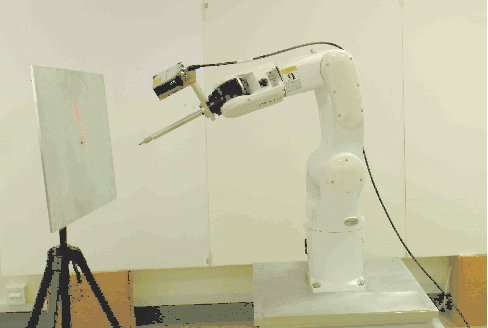
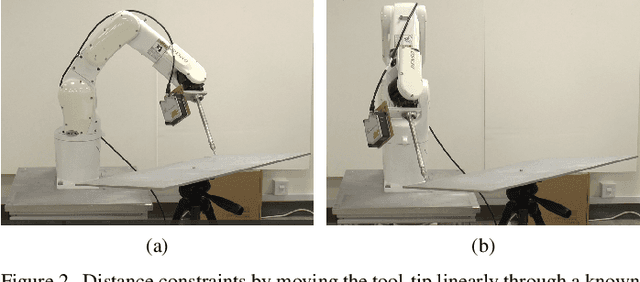


In this paper, we propose SCALAR, a calibration method to simultaneously calibrate the kinematic parameters of a 6-DoF robot and the extrinsic parameters of a 2D Laser Range Finder (LRF) attached to the robot's flange. The calibration setup requires only a flat plate with two small holes carved on it at a known distance from each other, and a sharp tool-tip attached to the robot's flange. The calibration is formulated as a nonlinear optimization problem where the laser and the tool-tip are used to provide planar and distance constraints, and the optimization problem is solved using Levenberg-Marquardt algorithm. We demonstrate through experiments that SCALAR can reduce the mean and the maximum tool position error from 0.44 mm to 0.19 mm and from 1.41 mm to 0.50 mm, respectively.