 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Landing Controller for Quadruped Robots
May 12, 2023Quadruped robots are machines intended for challenging and harsh environments. Despite the progress in locomotion strategy, safely recovering from unexpected falls or planned drops is still an open problem. It is further made more difficult when high horizontal velocities are involved. In this work, we propose an optimization-based reactive Landing Controller that uses only proprioceptive measures for torque-controlled quadruped robots that free-fall on a flat horizontal ground, knowing neither the distance to the landing surface nor the flight time. Based on an estimate of the Center of Mass horizontal velocity, the method uses the Variable Height Springy Inverted Pendulum model for continuously recomputing the feet position while the robot is falling. In this way, the quadruped is ready to attain a successful landing in all directions, even in the presence of significant horizontal velocities. The method is demonstrated to dramatically enlarge the region of horizontal velocities that can be dealt with by a naive approach that keeps the feet still during the airborne stage. To the best of our knowledge, this is the first time that a quadruped robot can successfully recover from falls with horizontal velocities up to 3 m/s in simulation. Experiments prove that the used platform, Go1, can successfully attain a stable standing configuration from falls with various horizontal velocity and different angular perturbations.
Locosim: an Open-Source Cross-Platform Robotics Framework
May 03, 2023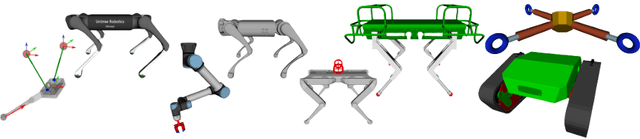
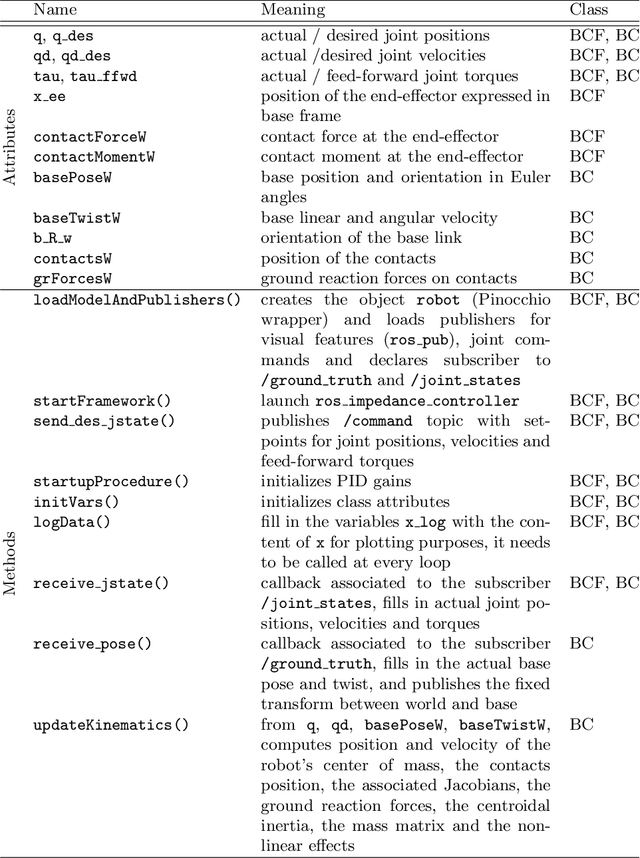


The architecture of a robotics software framework tremendously influences the effort and time it takes for end users to test new concepts in a simulation environment and to control real hardware. Many years of activity in the field allowed us to sort out crucial requirements for a framework tailored for robotics: modularity and extensibility, source code reusability, feature richness, and user-friendliness. We implemented these requirements and collected best practices in Locosim, a cross-platform framework for simulation and real hardware. In this paper, we describe the architecture of Locosim and illustrate some use cases that show its potential.
Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots
Aug 25, 2022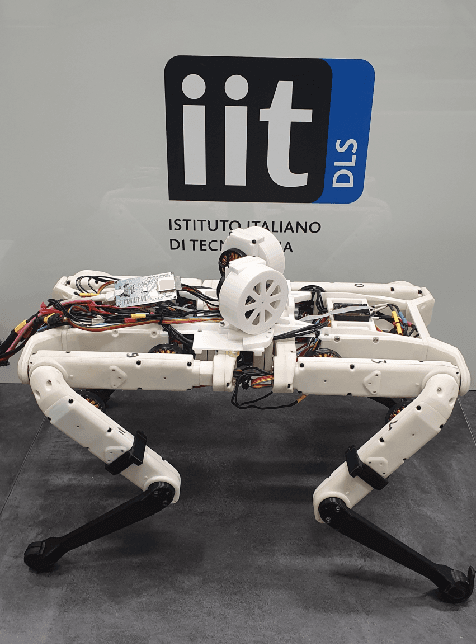
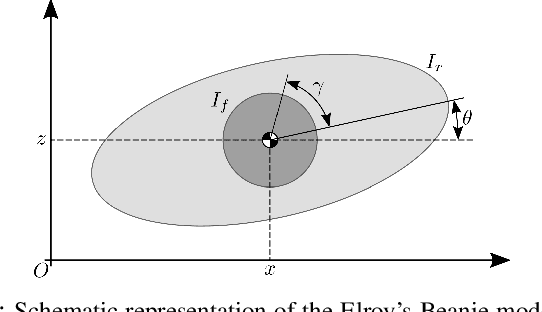
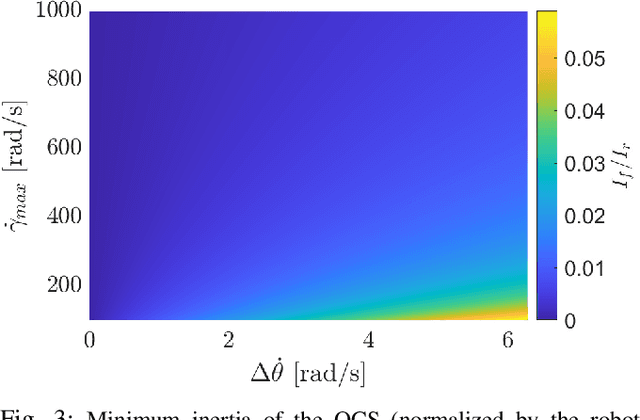
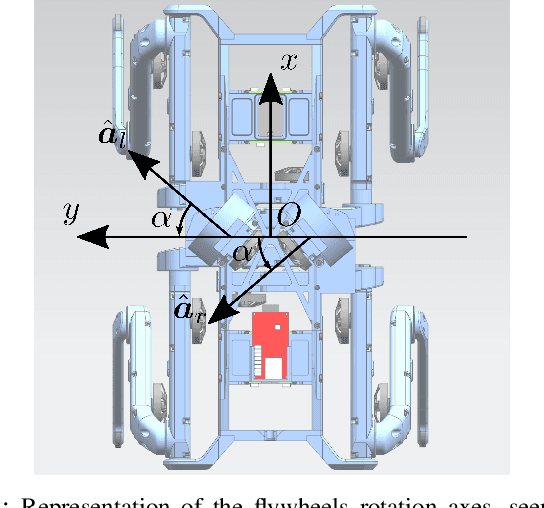
For legged robots, aerial motions are the only option to overpass obstacles that cannot be circumvent with standard locomotion gaits. In these cases, the robot must perform a leap to either jump onto the obstacle or fly over it. However, these movements represent a challenge because during the flight phase the \gls{com} cannot be controlled, and the robot orientation has limited controllability. This paper focuses on the latter issue and proposes an \gls{ocs} consisting of two rotating and actuated masses (flywheels or reaction wheels) to gain control authority on the robot orientation. Because of the conservation of angular momentum, their rotational velocity can be adjusted to steer the robot orientation even when there are no contacts with the ground. The axes of rotation of the flywheels are designed to be incident, leading to a compact orientation control system that is capable of controlling both roll and pitch angles, considering the different moment of inertia in the two directions. We tested the concept with simulations on the robot Solo12.