 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual search and recognition for robot task execution and monitoring
Feb 07, 2019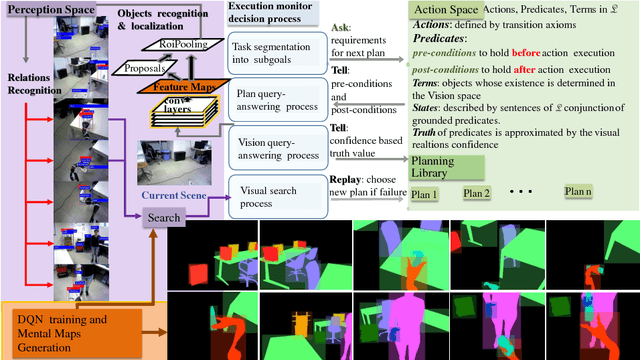


Visual search of relevant targets in the environment is a crucial robot skill. We propose a preliminary framework for the execution monitor of a robot task, taking care of the robot attitude to visually searching the environment for targets involved in the task. Visual search is also relevant to recover from a failure. The framework exploits deep reinforcement learning to acquire a "common sense" scene structure and it takes advantage of a deep convolutional network to detect objects and relevant relations holding between them. The framework builds on these methods to introduce a vision-based execution monitoring, which uses classical planning as a backbone for task execution. Experiments show that with the proposed vision-based execution monitor the robot can complete simple tasks and can recover from failures in autonomy.
Vision-based deep execution monitoring
Sep 29, 2017
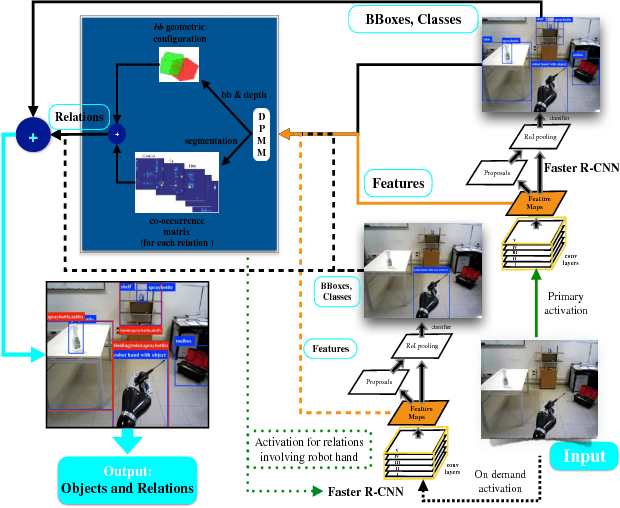
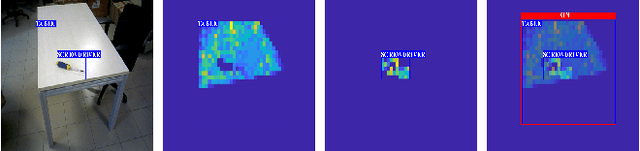
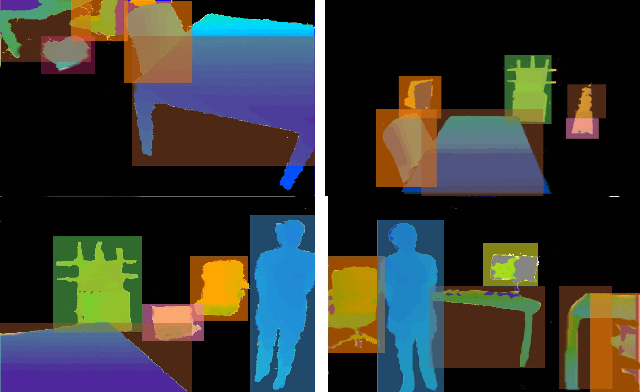
Execution monitor of high-level robot actions can be effectively improved by visual monitoring the state of the world in terms of preconditions and postconditions that hold before and after the execution of an action. Furthermore a policy for searching where to look at, either for verifying the relations that specify the pre and postconditions or to refocus in case of a failure, can tremendously improve the robot execution in an uncharted environment. It is now possible to strongly rely on visual perception in order to make the assumption that the environment is observable, by the amazing results of deep learning. In this work we present visual execution monitoring for a robot executing tasks in an uncharted Lab environment. The execution monitor interacts with the environment via a visual stream that uses two DCNN for recognizing the objects the robot has to deal with and manipulate, and a non-parametric Bayes estimation to discover the relations out of the DCNN features. To recover from lack of focus and failures due to missed objects we resort to visual search policies via deep reinforcement learning.