 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHIPer: A Human-Inspired Scene Perception Model for Multifunctional Mobile Robots
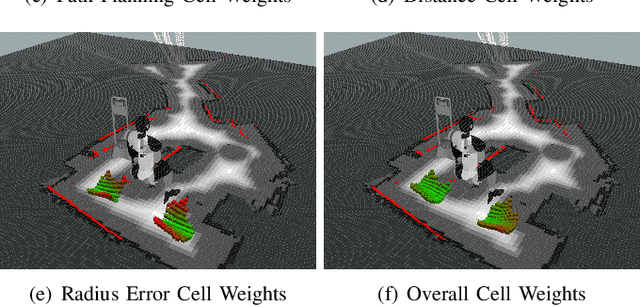
Apr 27, 2024Taking over arbitrary tasks like humans do with a mobile service robot in open-world settings requires a holistic scene perception for decision-making and high-level control. This paper presents a human-inspired scene perception model to minimize the gap between human and robotic capabilities. The approach takes over fundamental neuroscience concepts, such as a triplet perception split into recognition, knowledge representation, and knowledge interpretation. A recognition system splits the background and foreground to integrate exchangeable image-based object detectors and SLAM, a multi-layer knowledge base represents scene information in a hierarchical structure and offers interfaces for high-level control, and knowledge interpretation methods deploy spatio-temporal scene analysis and perceptual learning for self-adjustment. A single-setting ablation study is used to evaluate the impact of each component on the overall performance for a fetch-and-carry scenario in two simulated and one real-world environment.
MobiKa - Low-Cost Mobile Robot for Human-Robot Interaction
May 03, 2019


One way to allow elderly people to stay longer in their homes is to use of service robots to support them with everyday tasks. With this goal, we design, develop and evaluate a low-cost mobile robot to communicate with elderly people. The main idea is to create an affordable communication assistant robot which is optimized for multimodal Human-Robot Interaction (HRI). Our robot can navigate autonomously through dynamic environments using a new algorithm to calculate poses for approaching persons. The robot was tested in a real life scenario in an elderly care home.