 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegistration of algebraic varieties using Riemannian optimization
Jan 16, 2024We consider the point cloud registration problem, the task of finding a transformation between two point clouds that represent the same object but are expressed in different coordinate systems. Our approach is not based on a point-to-point correspondence, matching every point in the source point cloud to a point in the target point cloud. Instead, we assume and leverage a low-dimensional nonlinear geometric structure of the data. Firstly, we approximate each point cloud by an algebraic variety (a set defined by finitely many polynomial equations). This is done by solving an optimization problem on the Grassmann manifold, using a connection between algebraic varieties and polynomial bases. Secondly, we solve an optimization problem on the orthogonal group to find the transformation (rotation $+$ translation) which makes the two algebraic varieties overlap. We use second-order Riemannian optimization methods for the solution of both steps. Numerical experiments on real and synthetic data are provided, with encouraging results. Our approach is particularly useful when the two point clouds describe different parts of an objects (which may not even be overlapping), on the condition that the surface of the object may be well approximated by a set of polynomial equations. The first procedure -- the approximation -- is of independent interest, as it can be used for denoising data that belongs to an algebraic variety. We provide statistical guarantees for the estimation error of the denoising using Stein's unbiased estimator.
Nonlinear matrix recovery using optimization on the Grassmann manifold
Sep 13, 2021

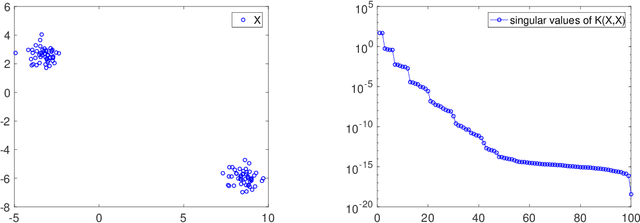
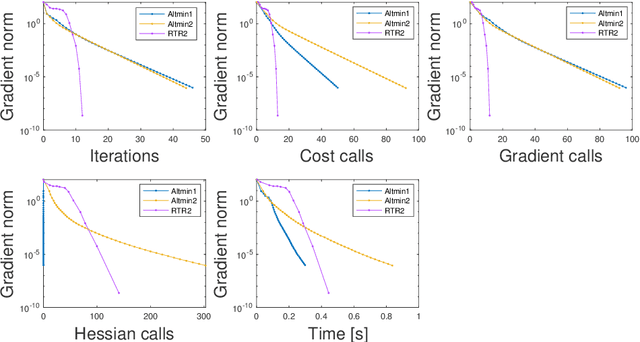
We investigate the problem of recovering a partially observed high-rank matrix whose columns obey a nonlinear structure such as a union of subspaces, an algebraic variety or grouped in clusters. The recovery problem is formulated as the rank minimization of a nonlinear feature map applied to the original matrix, which is then further approximated by a constrained non-convex optimization problem involving the Grassmann manifold. We propose two sets of algorithms, one arising from Riemannian optimization and the other as an alternating minimization scheme, both of which include first- and second-order variants. Both sets of algorithms have theoretical guarantees. In particular, for the alternating minimization, we establish global convergence and worst-case complexity bounds. Additionally, using the Kurdyka-Lojasiewicz property, we show that the alternating minimization converges to a unique limit point. We provide extensive numerical results for the recovery of union of subspaces and clustering under entry sampling and dense Gaussian sampling. Our methods are competitive with existing approaches and, in particular, high accuracy is achieved in the recovery using Riemannian second-order methods.