 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Information Gathering Under Dynamics Uncertainty
Jan 29, 2026An agent operating in an unknown dynamical system must learn its dynamics from observations. Active information gathering accelerates this learning, but existing methods derive bespoke costs for specific modeling choices: dynamics models, belief update procedures, observation models, and planners. We present a unifying framework that decouples these choices from the information-gathering cost by explicitly exposing the causal dependencies between parameters, beliefs, and controls. Using this framework, we derive a general information-gathering cost based on Massey's directed information that assumes only Markov dynamics with additive noise and is otherwise agnostic to modeling choices. We prove that the mutual information cost used in existing literature is a special case of our cost. Then, we leverage our framework to establish an explicit connection between the mutual information cost and information gain in linearized Bayesian estimation, thereby providing theoretical justification for mutual information-based active learning approaches. Finally, we illustrate the practical utility of our framework through experiments spanning linear, nonlinear, and multi-agent systems.
PSN Game: Game-theoretic Planning via a Player Selection Network
Apr 30, 2025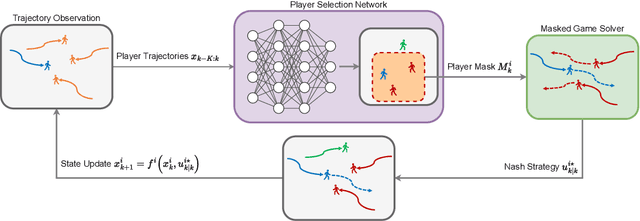
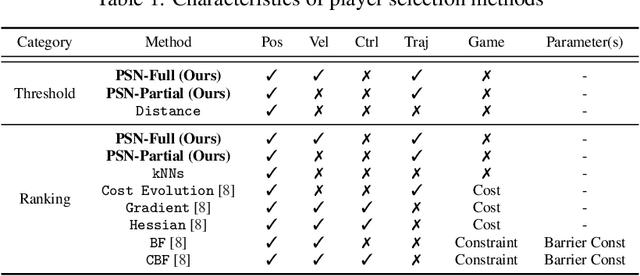
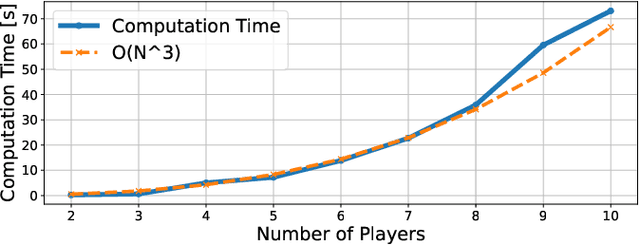
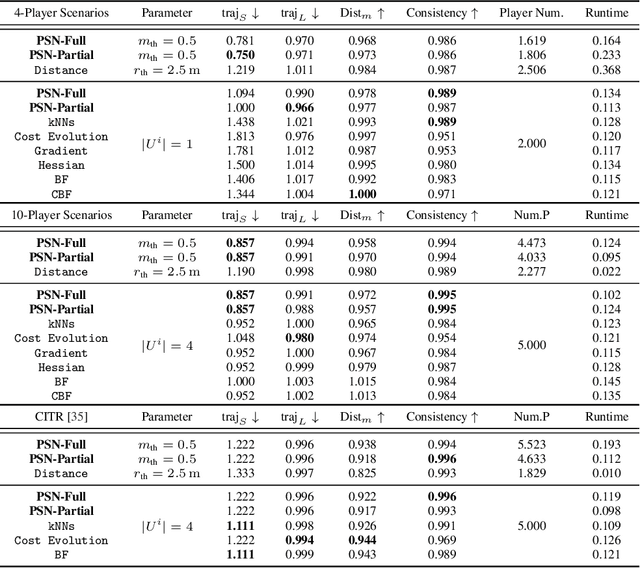
While game-theoretic planning frameworks are effective at modeling multi-agent interactions, they require solving optimization problems with hundreds or thousands of variables, resulting in long computation times that limit their use in large-scale, real-time systems. To address this issue, we propose PSN Game: a novel game-theoretic planning framework that reduces runtime by learning a Player Selection Network (PSN). A PSN outputs a player selection mask that distinguishes influential players from less relevant ones, enabling the ego player to solve a smaller, masked game involving only selected players. By reducing the number of variables in the optimization problem, PSN directly lowers computation time. The PSN Game framework is more flexible than existing player selection methods as it i) relies solely on observations of players' past trajectories, without requiring full state, control, or other game-specific information; and ii) requires no online parameter tuning. We train PSNs in an unsupervised manner using a differentiable dynamic game solver, with reference trajectories from full-player games guiding the learning. Experiments in both simulated scenarios and human trajectory datasets demonstrate that i) PSNs outperform baseline selection methods in trajectory smoothness and length, while maintaining comparable safety and achieving a 10x speedup in runtime; and ii) PSNs generalize effectively to real-world scenarios without fine-tuning. By selecting only the most relevant players for decision-making, PSNs offer a general mechanism for reducing planning complexity that can be seamlessly integrated into existing multi-agent planning frameworks.
Learning Hyperplanes for Multi-Agent Collision Avoidance in Space
Nov 15, 2023A core challenge of multi-robot interactions is collision avoidance among robots with potentially conflicting objectives. We propose a game-theoretic method for collision avoidance based on rotating hyperplane constraints. These constraints ensure collision avoidance by defining separating hyperplanes that rotate around a keep-out zone centered on certain robots. Since it is challenging to select the parameters that define a hyperplane without introducing infeasibilities, we propose to learn them from an expert trajectory i.e., one collected by recording human operators. To do so, we solve for the parameters whose corresponding equilibrium trajectory best matches the expert trajectory. We validate our method by learning hyperplane parameters from noisy expert trajectories and demonstrate the generalizability of the learned parameters to scenarios with more robots and previously unseen initial conditions.