 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative adversarial network based single pixel imaging
Jul 11, 2021



Single pixel imaging can reconstruct two-dimensional images of a scene with only a single-pixel detector. It has been widely used for imaging in non-visible bandwidth (e.g., near-infrared and X-ray) where focal-plane array sensors are challenging to be manufactured. In this paper, we propose a generative adversarial network based reconstruction algorithm for single pixel imaging, which demonstrates efficient reconstruction in 10ms and higher quality. We verify the proposed method with both synthetic and real-world experiments, and demonstrate a good quality of reconstruction of a real-world plaster using a 0.05 sampling rate.
Adaptive Illumination based Depth Sensing using Deep Learning
Mar 23, 2021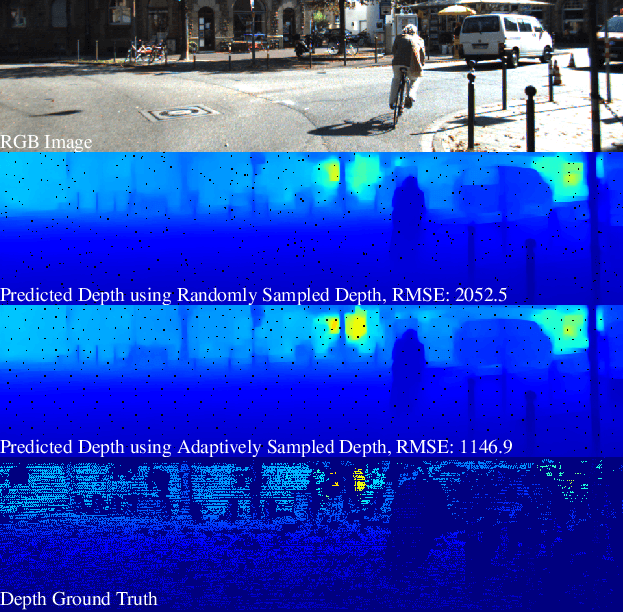
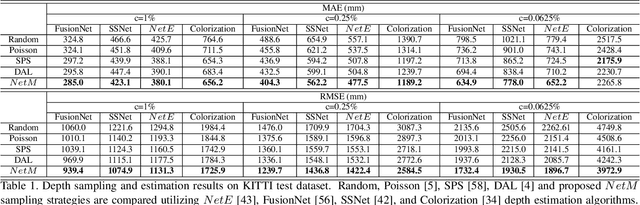
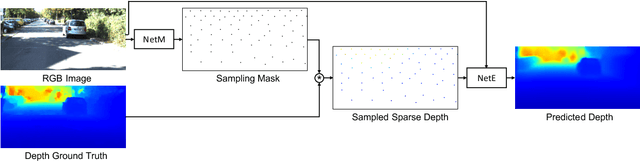
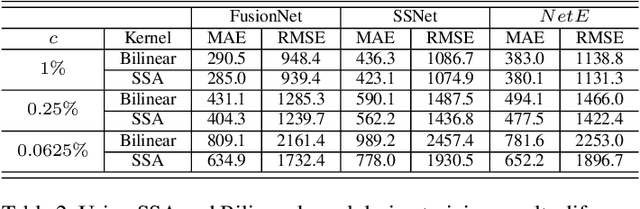
Dense depth map capture is challenging in existing active sparse illumination based depth acquisition techniques, such as LiDAR. Various techniques have been proposed to estimate a dense depth map based on fusion of the sparse depth map measurement with the RGB image. Recent advances in hardware enable adaptive depth measurements resulting in further improvement of the dense depth map estimation. In this paper, we study the topic of estimating dense depth from depth sampling. The adaptive sparse depth sampling network is jointly trained with a fusion network of an RGB image and sparse depth, to generate optimal adaptive sampling masks. We show that such adaptive sampling masks can generalize well to many RGB and sparse depth fusion algorithms under a variety of sampling rates (as low as $0.0625\%$). The proposed adaptive sampling method is fully differentiable and flexible to be trained end-to-end with upstream perception algorithms.