 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Illumination based Depth Sensing using Deep Learning
Paper and Code
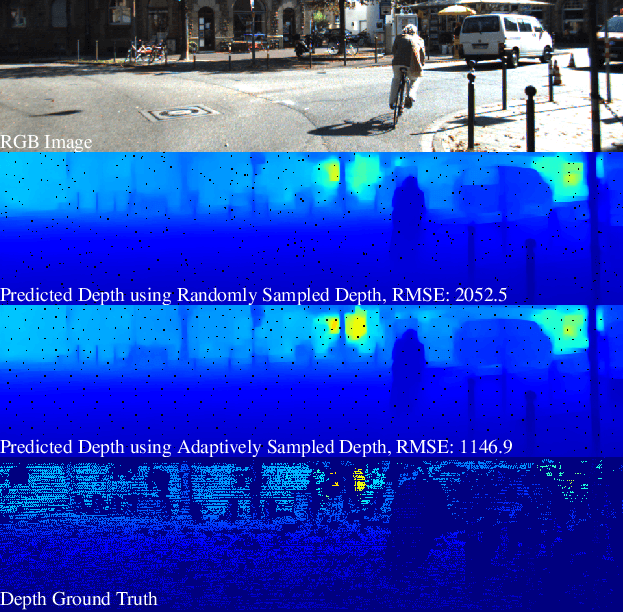
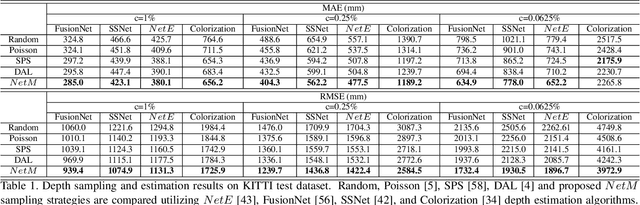
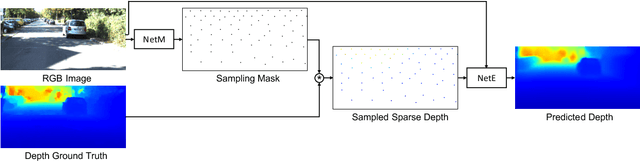
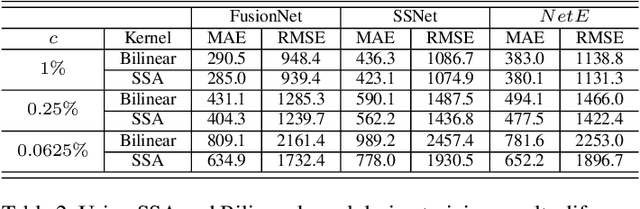
Dense depth map capture is challenging in existing active sparse illumination based depth acquisition techniques, such as LiDAR. Various techniques have been proposed to estimate a dense depth map based on fusion of the sparse depth map measurement with the RGB image. Recent advances in hardware enable adaptive depth measurements resulting in further improvement of the dense depth map estimation. In this paper, we study the topic of estimating dense depth from depth sampling. The adaptive sparse depth sampling network is jointly trained with a fusion network of an RGB image and sparse depth, to generate optimal adaptive sampling masks. We show that such adaptive sampling masks can generalize well to many RGB and sparse depth fusion algorithms under a variety of sampling rates (as low as $0.0625\%$). The proposed adaptive sampling method is fully differentiable and flexible to be trained end-to-end with upstream perception algorithms.