 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowd Source Scene Change Detection and Local Map Update
Mar 10, 2022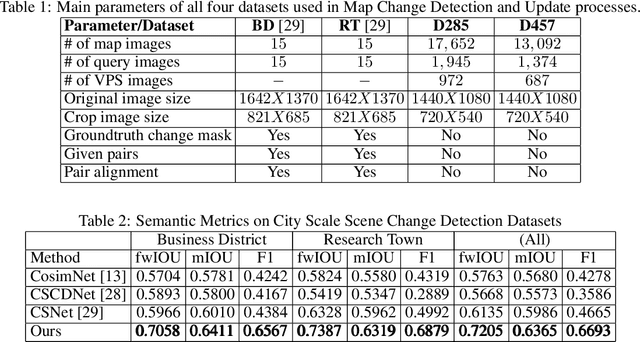
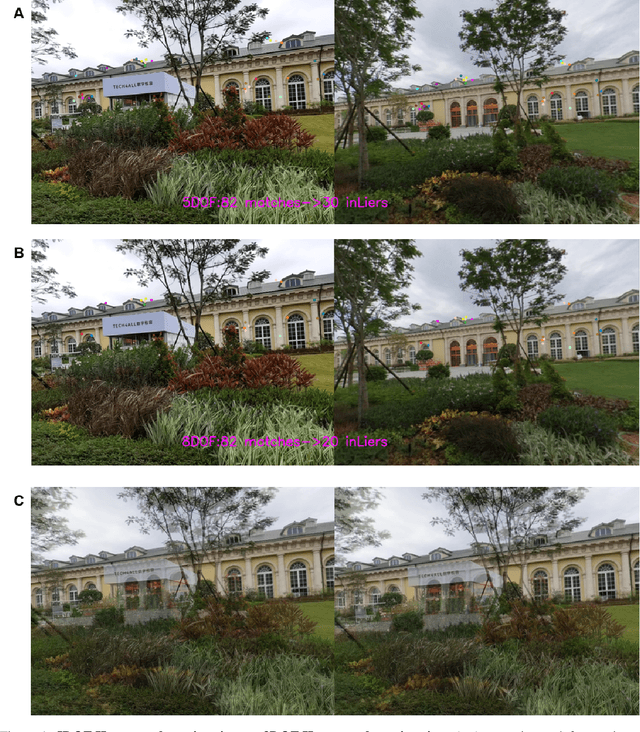

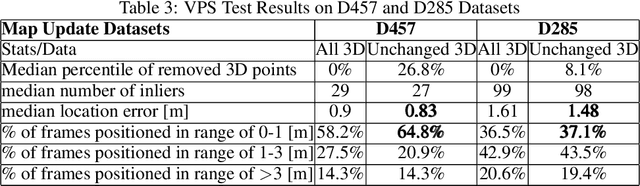
As scene changes with time map descriptors become outdated, affecting VPS localization accuracy. In this work, we propose an approach to detect structural and texture scene changes to be followed by map update. In our method - map includes 3D points with descriptors generated either via LiDAR or SFM. Common approaches suffer from shortcomings: 1) Direct comparison of the two point-clouds for change detection is slow due to the need to build new point-cloud every time we want to compare; 2) Image based comparison requires to keep the map images adding substantial storage overhead. To circumvent this problems, we propose an approach based on point-clouds descriptors comparison: 1) Based on VPS poses select close query and map images pairs, 2) Registration of query images to map image descriptors, 3) Use segmentation to filter out dynamic or short term temporal changes, 4) Compare the descriptors between corresponding segments.