 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection and Pose Estimation of flat, Texture-less Industry Objects on HoloLens using synthetic Training
Feb 07, 2024Current state-of-the-art 6d pose estimation is too compute intensive to be deployed on edge devices, such as Microsoft HoloLens (2) or Apple iPad, both used for an increasing number of augmented reality applications. The quality of AR is greatly dependent on its capabilities to detect and overlay geometry within the scene. We propose a synthetically trained client-server-based augmented reality application, demonstrating state-of-the-art object pose estimation of metallic and texture-less industry objects on edge devices. Synthetic data enables training without real photographs, i.e. for yet-to-be-manufactured objects. Our qualitative evaluation on an AR-assisted sorting task, and quantitative evaluation on both renderings, as well as real-world data recorded on HoloLens 2, sheds light on its real-world applicability.
* Scandinavian Conference on Image Analysis 2023
calibDB: enabling web based computer vision through on-the-fly camera calibration
Aug 15, 2019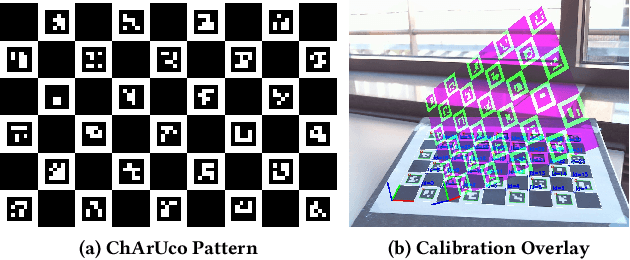
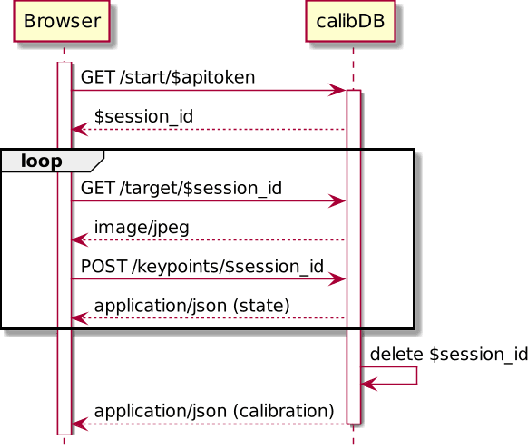
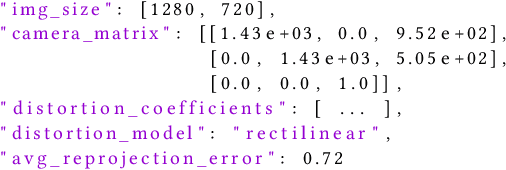
For many computer vision applications, the availability of camera calibration data is crucial as overall quality heavily depends on it. While calibration data is available on some devices through Augmented Reality (AR) frameworks like ARCore and ARKit, for most cameras this information is not available. Therefore, we propose a web based calibration service that not only aggregates calibration data, but also allows calibrating new cameras on-the-fly. We build upon a novel camera calibration framework that enables even novice users to perform a precise camera calibration in about 2 minutes. This allows general deployment of computer vision algorithms on the web, which was previously not possible due to lack of calibration data.