 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnticipation through Head Pose Estimation: a preliminary study
Aug 10, 2024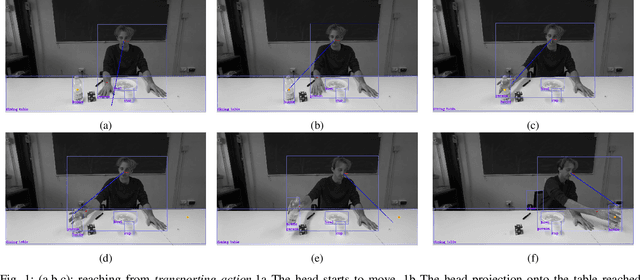
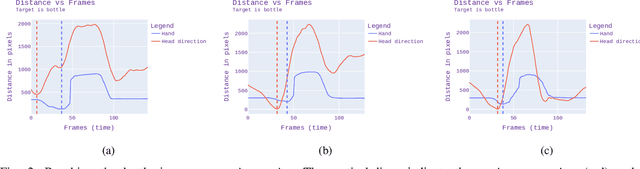
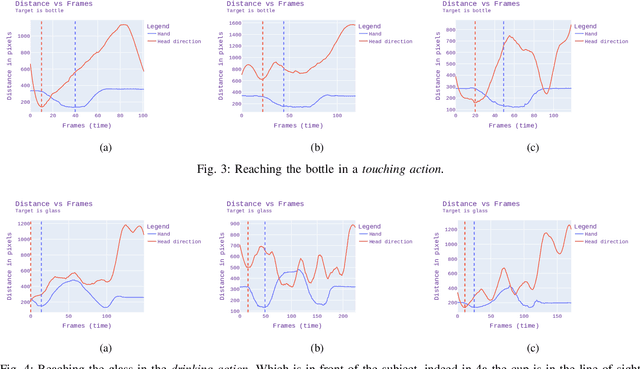
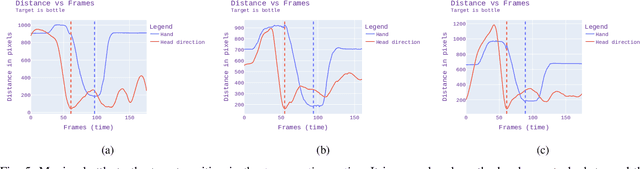
The ability to anticipate others' goals and intentions is at the basis of human-human social interaction. Such ability, largely based on non-verbal communication, is also a key to having natural and pleasant interactions with artificial agents, like robots. In this work, we discuss a preliminary experiment on the use of head pose as a visual cue to understand and anticipate action goals, particularly reaching and transporting movements. By reasoning on the spatio-temporal connections between the head, hands and objects in the scene, we will show that short-range anticipation is possible, laying the foundations for future applications to human-robot interaction.
HHP-Net: A light Heteroscedastic neural network for Head Pose estimation with uncertainty
Nov 03, 2021
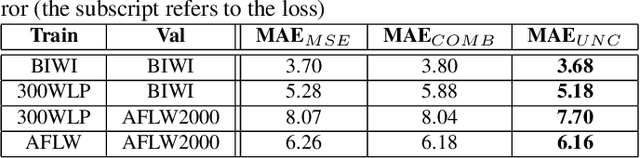
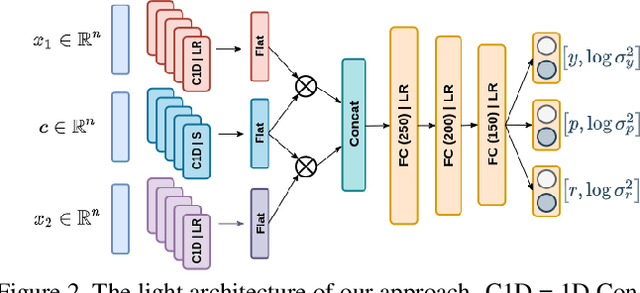

In this paper we introduce a novel method to estimate the head pose of people in single images starting from a small set of head keypoints. To this purpose, we propose a regression model that exploits keypoints computed automatically by 2D pose estimation algorithms and outputs the head pose represented by yaw, pitch, and roll. Our model is simple to implement and more efficient with respect to the state of the art -- faster in inference and smaller in terms of memory occupancy -- with comparable accuracy. Our method also provides a measure of the heteroscedastic uncertainties associated with the three angles, through an appropriately designed loss function; we show there is a correlation between error and uncertainty values, thus this extra source of information may be used in subsequent computational steps. As an example application, we address social interaction analysis in images: we propose an algorithm for a quantitative estimation of the level of interaction between people, starting from their head poses and reasoning on their mutual positions. The code is available at https://github.com/cantarinigiorgio/HHP-Net.