Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnticipation through Head Pose Estimation: a preliminary study
Paper and Code
Aug 10, 2024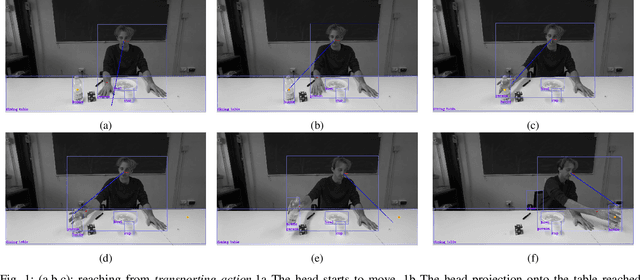
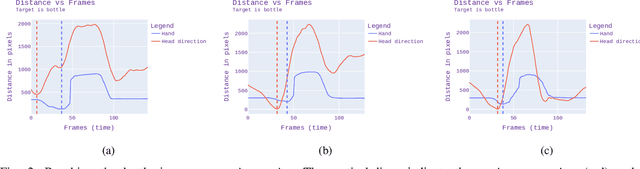
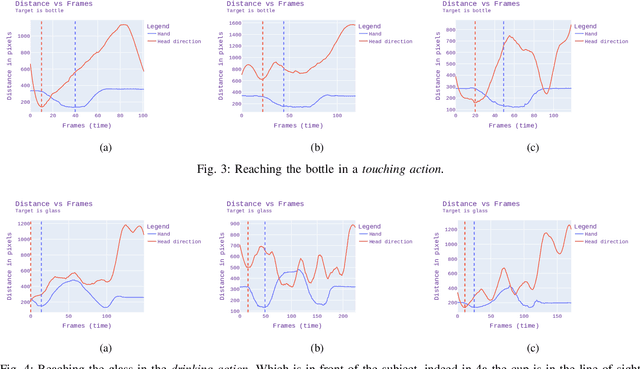
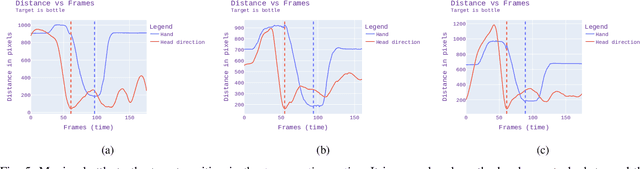
The ability to anticipate others' goals and intentions is at the basis of human-human social interaction. Such ability, largely based on non-verbal communication, is also a key to having natural and pleasant interactions with artificial agents, like robots. In this work, we discuss a preliminary experiment on the use of head pose as a visual cue to understand and anticipate action goals, particularly reaching and transporting movements. By reasoning on the spatio-temporal connections between the head, hands and objects in the scene, we will show that short-range anticipation is possible, laying the foundations for future applications to human-robot interaction.
* Accepted at the workshop on advancing Group Understanding and robots'
adaptive behavior (GROUND), held at the Robotics Science and Systems (RSS)
Conference, 2024
View paper on