 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic dimensionality reduction of Twin-in-the-Loop Observers
Jan 18, 2024
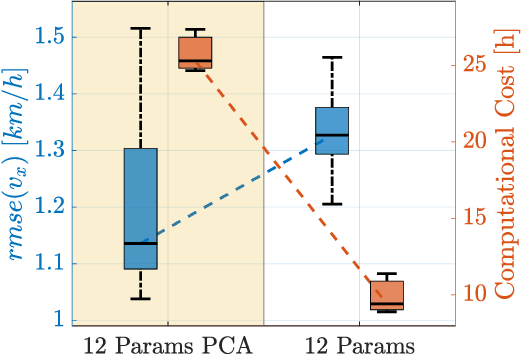


State-of-the-art vehicle dynamics estimation techniques usually share one common drawback: each variable to estimate is computed with an independent, simplified filtering module. These modules run in parallel and need to be calibrated separately. To solve this issue, a unified Twin-in-the-Loop (TiL) Observer architecture has recently been proposed: the classical simplified control-oriented vehicle model in the estimators is replaced by a full-fledged vehicle simulator, or digital twin (DT). The states of the DT are corrected in real time with a linear time invariant output error law. Since the simulator is a black-box, no explicit analytical formulation is available, hence classical filter tuning techniques cannot be used. Due to this reason, Bayesian Optimization will be used to solve a data-driven optimization problem to tune the filter. Due to the complexity of the DT, the optimization problem is high-dimensional. This paper aims to find a procedure to tune the high-complexity observer by lowering its dimensionality. In particular, in this work we will analyze both a supervised and an unsupervised learning approach. The strategies have been validated for speed and yaw-rate estimation on real-world data.
Unraveling the Control Engineer's Craft with Neural Networks
Nov 20, 2023Many industrial processes require suitable controllers to meet their performance requirements. More often, a sophisticated digital twin is available, which is a highly complex model that is a virtual representation of a given physical process, whose parameters may not be properly tuned to capture the variations in the physical process. In this paper, we present a sim2real, direct data-driven controller tuning approach, where the digital twin is used to generate input-output data and suitable controllers for several perturbations in its parameters. State-of-the art neural-network architectures are then used to learn the controller tuning rule that maps input-output data onto the controller parameters, based on artificially generated data from perturbed versions of the digital twin. In this way, as far as we are aware, we tackle for the first time the problem of re-calibrating the controller by meta-learning the tuning rule directly from data, thus practically replacing the control engineer with a machine learning model. The benefits of this methodology are illustrated via numerical simulations for several choices of neural-network architectures.