 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointCrack3D: Crack Detection in Unstructured Environments using a 3D-Point-Cloud-Based Deep Neural Network
Nov 23, 2021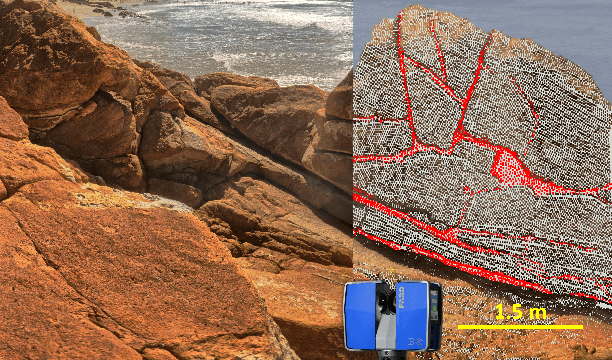
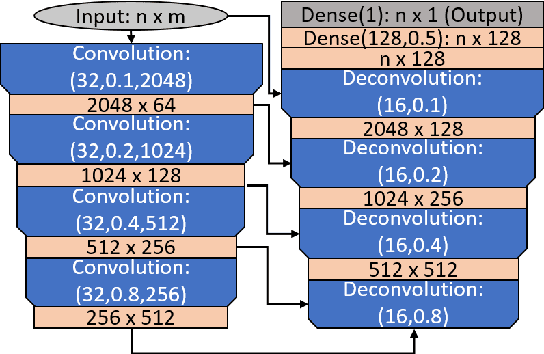

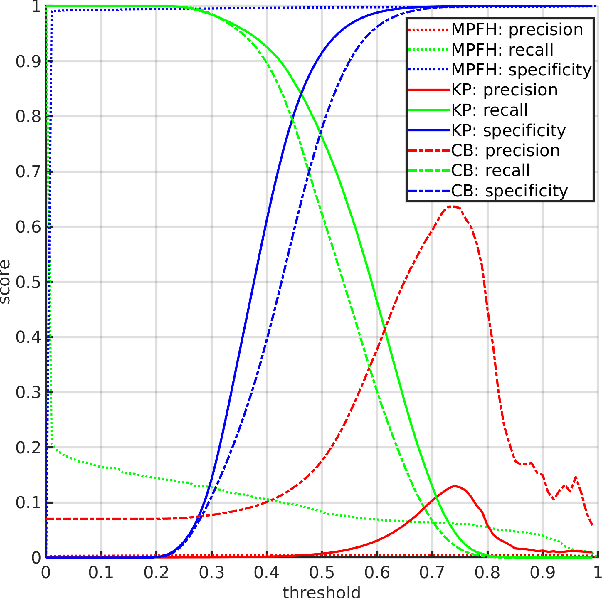
Surface cracks on buildings, natural walls and underground mine tunnels can indicate serious structural integrity issues that threaten the safety of the structure and people in the environment. Timely detection and monitoring of cracks are crucial to managing these risks, especially if the systems can be made highly automated through robots. Vision-based crack detection algorithms using deep neural networks have exhibited promise for structured surfaces such as walls or civil engineering tunnels, but little work has addressed highly unstructured environments such as rock cliffs and bare mining tunnels. To address this challenge, this paper presents PointCrack3D, a new 3D-point-cloud-based crack detection algorithm for unstructured surfaces. The method comprises three key components: an adaptive down-sampling method that maintains sufficient crack point density, a DNN that classifies each point as crack or non-crack, and a post-processing clustering method that groups crack points into crack instances. The method was validated experimentally on a new large natural rock dataset, comprising coloured LIDAR point clouds spanning more than 900 m^2 and 412 individual cracks. Results demonstrate a crack detection rate of 97% overall and 100% for cracks with a maximum width of more than 3 cm, significantly outperforming the state of the art. Furthermore, for cross-validation, PointCrack3D was applied to an entirely new dataset acquired in different locations and not used at all in training and shown to detect 100% of its crack instances. We also characterise the relationship between detection performance, crack width and number of points per crack, providing a foundation upon which to make decisions about both practical deployments and future research directions.