 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards AI Lesion Tracking in PET/CT Imaging: A Siamese-based CNN Pipeline applied on PSMA PET/CT Scans
Jun 13, 2024



Assessing tumor response to systemic therapies is one of the main applications of PET/CT. Routinely, only a small subset of index lesions out of multiple lesions is analyzed. However, this operator dependent selection may bias the results due to possible significant inter-metastatic heterogeneity of response to therapy. Automated, AI based approaches for lesion tracking hold promise in enabling the analysis of many more lesions and thus providing a better assessment of tumor response. This work introduces a Siamese CNN approach for lesion tracking between PET/CT scans. Our approach is applied on the laborious task of tracking a high number of bone lesions in full-body baseline and follow-up [68Ga]Ga- or [18F]F-PSMA PET/CT scans after two cycles of [177Lu]Lu-PSMA therapy of metastatic castration resistant prostate cancer patients. Data preparation includes lesion segmentation and affine registration. Our algorithm extracts suitable lesion patches and forwards them into a Siamese CNN trained to classify the lesion patch pairs as corresponding or non-corresponding lesions. Experiments have been performed with different input patch types and a Siamese network in 2D and 3D. The CNN model successfully learned to classify lesion assignments, reaching a lesion tracking accuracy of 83 % in its best configuration with an AUC = 0.91. For remaining lesions the pipeline accomplished a re-identification rate of 89 %. We proved that a CNN may facilitate the tracking of multiple lesions in PSMA PET/CT scans. Future clinical studies are necessary if this improves the prediction of the outcome of therapies.
LegoFormer: Transformers for Block-by-Block Multi-view 3D Reconstruction
Jun 23, 2021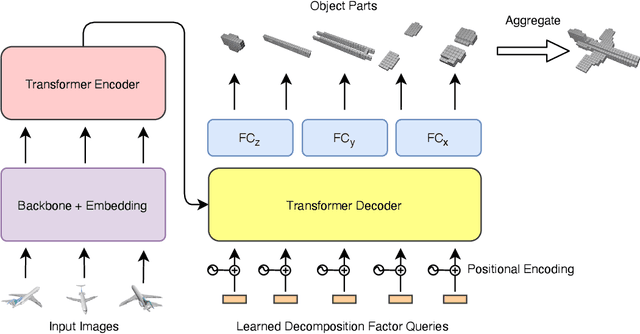
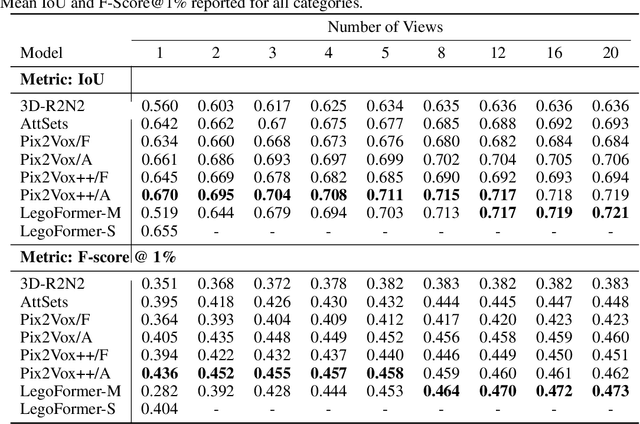
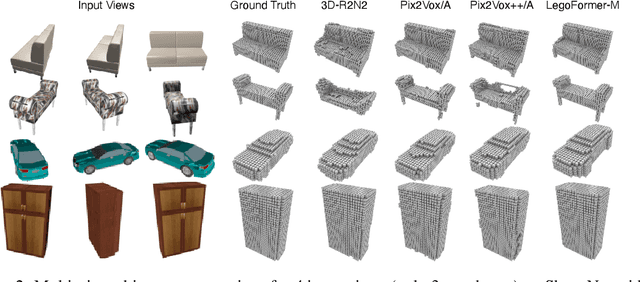
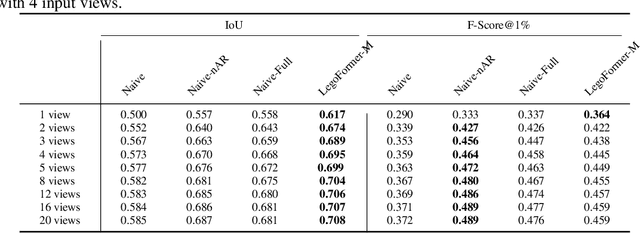
Most modern deep learning-based multi-view 3D reconstruction techniques use RNNs or fusion modules to combine information from multiple images after encoding them. These two separate steps have loose connections and do not consider all available information while encoding each view. We propose LegoFormer, a transformer-based model that unifies object reconstruction under a single framework and parametrizes the reconstructed occupancy grid by its decomposition factors. This reformulation allows the prediction of an object as a set of independent structures then aggregated to obtain the final reconstruction. Experiments conducted on ShapeNet display the competitive performance of our network with respect to the state-of-the-art methods. We also demonstrate how the use of self-attention leads to increased interpretability of the model output.