 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCupSimData: A RoboCup soccer research dataset
Nov 06, 2017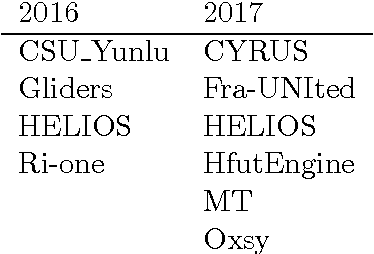

RoboCup is an international scientific robot competition in which teams of multiple robots compete against each other. Its different leagues provide many sources of robotics data, that can be used for further analysis and application of machine learning. This paper describes a large dataset from games of some of the top teams (from 2016 and 2017) in RoboCup Soccer Simulation League (2D), where teams of 11 robots (agents) compete against each other. Overall, we used 10 different teams to play each other, resulting in 45 unique pairings. For each pairing, we ran 25 matches (of 10mins), leading to 1125 matches or more than 180 hours of game play. The generated CSV files are 17GB of data (zipped), or 229GB (unzipped). The dataset is unique in the sense that it contains both the ground truth data (global, complete, noise-free information of all objects on the field), as well as the noisy, local and incomplete percepts of each robot. These data are made available as CSV files, as well as in the original soccer simulator formats.
Analysing Soccer Games with Clustering and Conceptors
Aug 19, 2017



We present a new approach for identifying situations and behaviours, which we call "moves", from soccer games in the 2D simulation league. Being able to identify key situations and behaviours are useful capabilities for analysing soccer matches, anticipating opponent behaviours to aid selection of appropriate tactics, and also as a prerequisite for automatic learning of behaviours and policies. To support a wide set of strategies, our goal is to identify situations from data, in an unsupervised way without making use of pre-defined soccer specific concepts such as "pass" or "dribble". The recurrent neural networks we use in our approach act as a high-dimensional projection of the recent history of a situation on the field. Similar situations, i.e., with similar histories, are found by clustering of network states. The same networks are also used to learn so-called conceptors, that are lower-dimensional manifolds that describe trajectories through a high-dimensional state space that enable situation-specific predictions from the same neural network. With the proposed approach, we can segment games into sequences of situations that are learnt in an unsupervised way, and learn conceptors that are useful for the prediction of the near future of the respective situation.
* To appear in RoboCup 2017: Robot World Cup XXI; Springer, 2018