 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpolating Between Softmax Policy Gradient and Neural Replicator Dynamics with Capped Implicit Exploration
Jun 04, 2022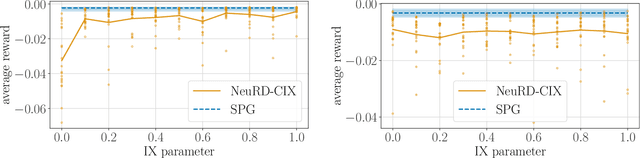
Neural replicator dynamics (NeuRD) is an alternative to the foundational softmax policy gradient (SPG) algorithm motivated by online learning and evolutionary game theory. The NeuRD expected update is designed to be nearly identical to that of SPG, however, we show that the Monte Carlo updates differ in a substantial way: the importance correction accounting for a sampled action is nullified in the SPG update, but not in the NeuRD update. Naturally, this causes the NeuRD update to have higher variance than its SPG counterpart. Building on implicit exploration algorithms in the adversarial bandit setting, we introduce capped implicit exploration (CIX) estimates that allow us to construct NeuRD-CIX, which interpolates between this aspect of NeuRD and SPG. We show how CIX estimates can be used in a black-box reduction to construct bandit algorithms with regret bounds that hold with high probability and the benefits this entails for NeuRD-CIX in sequential decision-making settings. Our analysis reveals a bias--variance tradeoff between SPG and NeuRD, and shows how theory predicts that NeuRD-CIX will perform well more consistently than NeuRD while retaining NeuRD's advantages over SPG in non-stationary environments.
Should Models Be Accurate?
May 22, 2022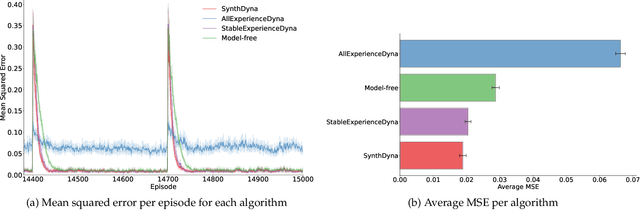
Model-based Reinforcement Learning (MBRL) holds promise for data-efficiency by planning with model-generated experience in addition to learning with experience from the environment. However, in complex or changing environments, models in MBRL will inevitably be imperfect, and their detrimental effects on learning can be difficult to mitigate. In this work, we question whether the objective of these models should be the accurate simulation of environment dynamics at all. We focus our investigations on Dyna-style planning in a prediction setting. First, we highlight and support three motivating points: a perfectly accurate model of environment dynamics is not practically achievable, is not necessary, and is not always the most useful anyways. Second, we introduce a meta-learning algorithm for training models with a focus on their usefulness to the learner instead of their accuracy in modelling the environment. Our experiments show that in a simple non-stationary environment, our algorithm enables faster learning than even using an accurate model built with domain-specific knowledge of the non-stationarity.