 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Regret of Adaptive Gradient Methods for Strongly Convex Problems
Sep 04, 2022
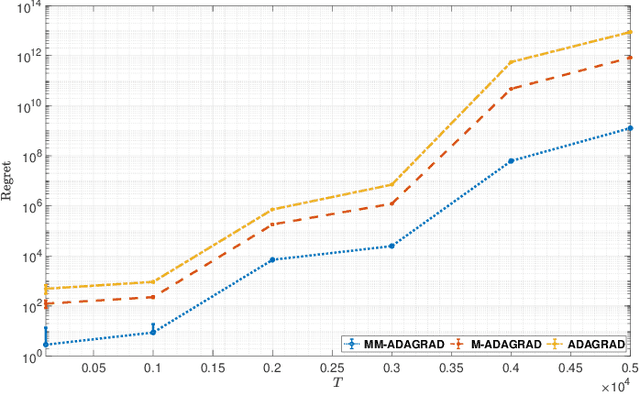
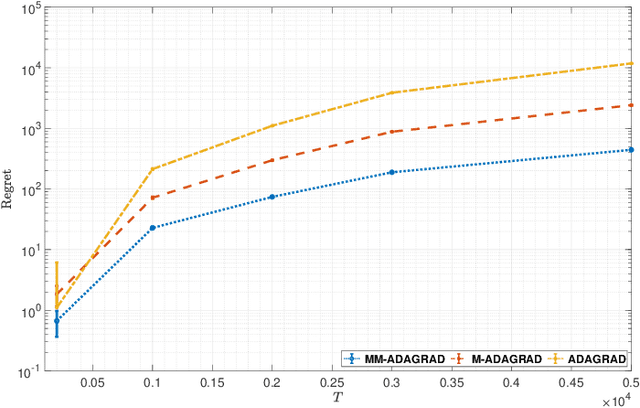
Adaptive gradient algorithms such as ADAGRAD and its variants have gained popularity in the training of deep neural networks. While many works as for adaptive methods have focused on the static regret as a performance metric to achieve a good regret guarantee, the dynamic regret analyses of these methods remain unclear. As opposed to the static regret, dynamic regret is considered to be a stronger concept of performance measurement in the sense that it explicitly elucidates the non-stationarity of the environment. In this paper, we go through a variant of ADAGRAD (referred to as M-ADAGRAD ) in a strong convex setting via the notion of dynamic regret, which measures the performance of an online learner against a reference (optimal) solution that may change over time. We demonstrate a regret bound in terms of the path-length of the minimizer sequence that essentially reflects the non-stationarity of environments. In addition, we enhance the dynamic regret bound by exploiting the multiple accesses of the gradient to the learner in each round. Empirical results indicate that M-ADAGRAD works also well in practice.
Dynamic Regret Analysis for Online Meta-Learning
Sep 29, 2021The online meta-learning framework has arisen as a powerful tool for the continual lifelong learning setting. The goal for an agent is to quickly learn new tasks by drawing on prior experience, while it faces with tasks one after another. This formulation involves two levels: outer level which learns meta-learners and inner level which learns task-specific models, with only a small amount of data from the current task. While existing methods provide static regret analysis for the online meta-learning framework, we establish performance in terms of dynamic regret which handles changing environments from a global prospective. We also build off of a generalized version of the adaptive gradient methods that covers both ADAM and ADAGRAD to learn meta-learners in the outer level. We carry out our analyses in a stochastic setting, and in expectation prove a logarithmic local dynamic regret which depends explicitly on the total number of iterations T and parameters of the learner. Apart from, we also indicate high probability bounds on the convergence rates of proposed algorithm with appropriate selection of parameters, which have not been argued before.