 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYOLO-Former: YOLO Shakes Hand With ViT
Jan 11, 2024The proposed YOLO-Former method seamlessly integrates the ideas of transformer and YOLOv4 to create a highly accurate and efficient object detection system. The method leverages the fast inference speed of YOLOv4 and incorporates the advantages of the transformer architecture through the integration of convolutional attention and transformer modules. The results demonstrate the effectiveness of the proposed approach, with a mean average precision (mAP) of 85.76\% on the Pascal VOC dataset, while maintaining high prediction speed with a frame rate of 10.85 frames per second. The contribution of this work lies in the demonstration of how the innovative combination of these two state-of-the-art techniques can lead to further improvements in the field of object detection.
Deep Reinforcement Learning Graphs: Feedback Motion Planning via Neural Lyapunov Verification
Nov 29, 2023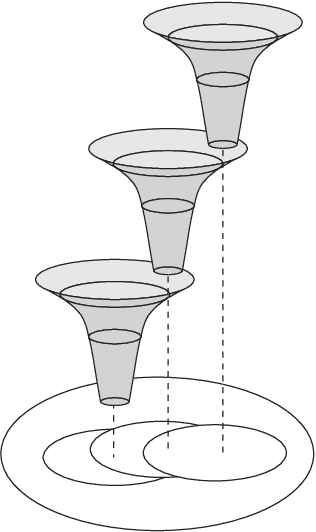

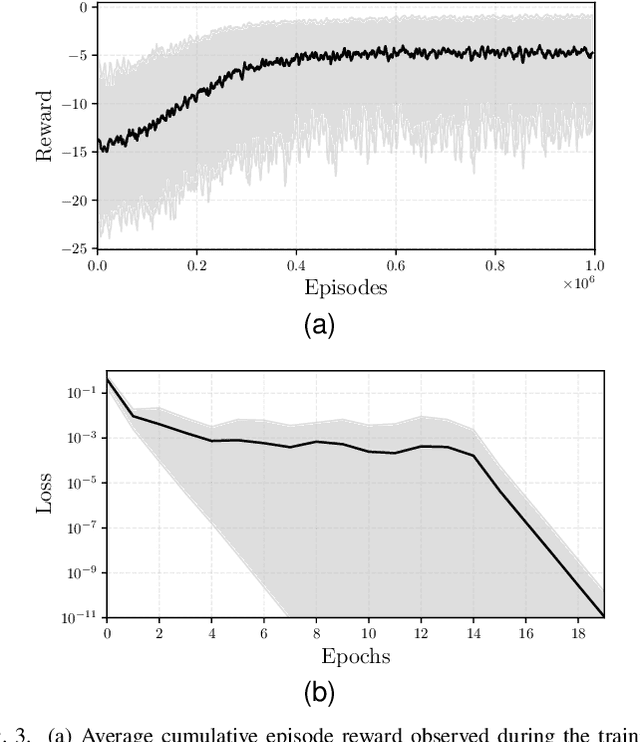
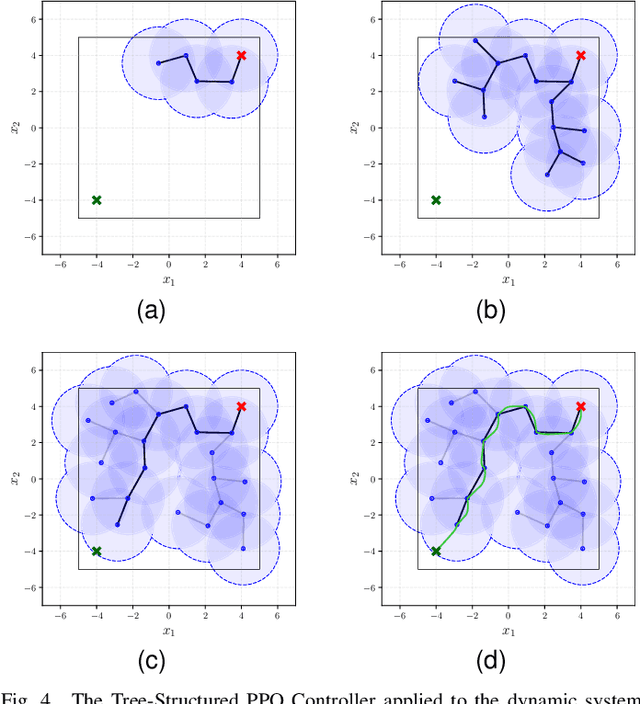
Recent advancements in model-free deep reinforcement learning have enabled efficient agent training. However, challenges arise when determining the region of attraction for these controllers, especially if the region does not fully cover the desired area. This paper addresses this issue by introducing a feedback motion control algorithm that utilizes data-driven techniques and neural networks. The algorithm constructs a graph of connected reinforcement-learning based controllers, each with its own defined region of attraction. This incremental approach effectively covers a bounded region of interest, creating a trajectory of interconnected nodes that guide the system from an initial state to the goal. Two approaches are presented for connecting nodes within the algorithm. The first is a tree-structured method, facilitating "point-to-point" control by constructing a tree connecting the initial state to the goal state. The second is a graph-structured method, enabling "space-to-space" control by building a graph within a bounded region. This approach allows for control from arbitrary initial and goal states. The proposed method's performance is evaluated on a first-order dynamic system, considering scenarios both with and without obstacles. The results demonstrate the effectiveness of the proposed algorithm in achieving the desired control objectives.
Safe Physical Human-Robot Interaction through Variable Impedance Control based on ISO/TS 15066
Nov 23, 2023The successful implementation of Physical Human-Robot Interaction in industrial environments depends on ensuring safe collaboration between human operators and robotic devices. This necessitates the adoption of measures that guarantee the safety of human operators in close proximity to robots, without constraining the speed and motion of the robotic systems. This paper proposes a novel variable impedance-based controller for cobots that ensures safe collaboration by adhering to the ISO/TS 15066 safety standard, namely power and force limiting mode, while achieving higher operational speeds. The effectiveness of the proposed controller has been compared with conventional methods and implemented on two different robotic platforms. The results demonstrate the designed controller achieves higher speeds, while maintaining compliance with safety standards. The proposed variable impedance holds significant potential for enabling efficient and safe collaboration between humans and robots in industrial settings.
Intelligent Cervical Spine Fracture Detection Using Deep Learning Methods
Nov 09, 2023Cervical spine fractures constitute a critical medical emergency, with the potential for lifelong paralysis or even fatality if left untreated or undetected. Over time, these fractures can deteriorate without intervention. To address the lack of research on the practical application of deep learning techniques for the detection of spine fractures, this study leverages a dataset containing both cervical spine fractures and non-fractured computed tomography images. This paper introduces a two-stage pipeline designed to identify the presence of cervical vertebrae in each image slice and pinpoint the location of fractures. In the first stage, a multi-input network, incorporating image and image metadata, is trained. This network is based on the Global Context Vision Transformer, and its performance is benchmarked against popular deep learning image classification model. In the second stage, a YOLOv8 model is trained to detect fractures within the images, and its effectiveness is compared to YOLOv5. The obtained results indicate that the proposed algorithm significantly reduces the workload of radiologists and enhances the accuracy of fracture detection.
Automated Wheat Disease Detection using a ROS-based Autonomous Guided UAV
Jun 30, 2022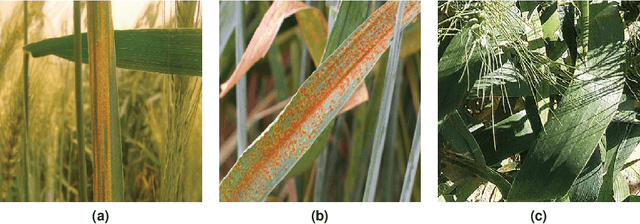

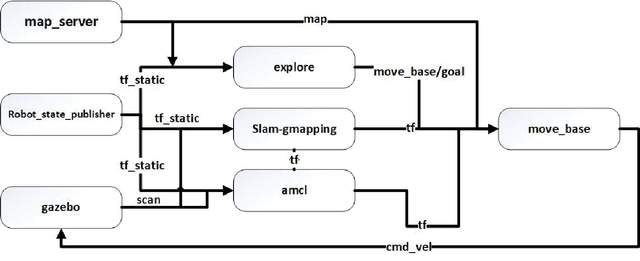
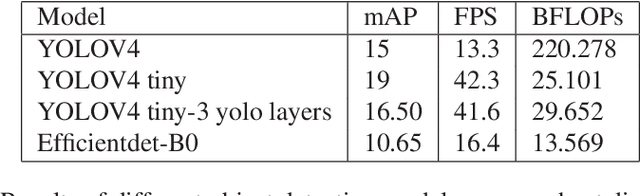
With the increase in world population, food resources have to be modified to be more productive, resistive, and reliable. Wheat is one of the most important food resources in the world, mainly because of the variety of wheat-based products. Wheat crops are threatened by three main types of diseases which cause large amounts of annual damage in crop yield. These diseases can be eliminated by using pesticides at the right time. While the task of manually spraying pesticides is burdensome and expensive, agricultural robotics can aid farmers by increasing the speed and decreasing the amount of chemicals. In this work, a smart autonomous system has been implemented on an unmanned aerial vehicle to automate the task of monitoring wheat fields. First, an image-based deep learning approach is used to detect and classify disease-infected wheat plants. To find the most optimal method, different approaches have been studied. Because of the lack of a public wheat-disease dataset, a custom dataset has been created and labeled. Second, an efficient mapping and navigation system is presented using a simulation in the robot operating system and Gazebo environments. A 2D simultaneous localization and mapping algorithm is used for mapping the workspace autonomously with the help of a frontier-based exploration method.