 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectoryNet: An Embedded GPS Trajectory Representation for Point-based Classification Using Recurrent Neural Networks
Aug 30, 2017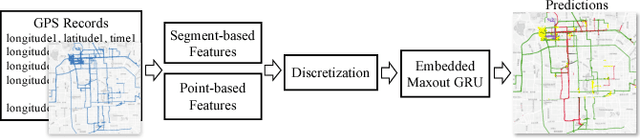

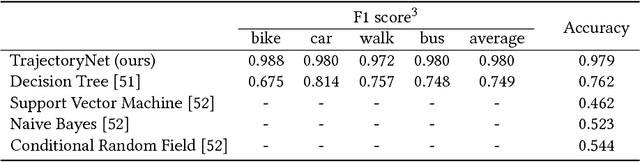
Understanding and discovering knowledge from GPS (Global Positioning System) traces of human activities is an essential topic in mobility-based urban computing. We propose TrajectoryNet-a neural network architecture for point-based trajectory classification to infer real world human transportation modes from GPS traces. To overcome the challenge of capturing the underlying latent factors in the low-dimensional and heterogeneous feature space imposed by GPS data, we develop a novel representation that embeds the original feature space into another space that can be understood as a form of basis expansion. We also enrich the feature space via segment-based information and use Maxout activations to improve the predictive power of Recurrent Neural Networks (RNNs). We achieve over 98% classification accuracy when detecting four types of transportation modes, outperforming existing models without additional sensory data or location-based prior knowledge.