 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompute-in-Memory Implementation of State Space Models for Event Sequence Processing
Nov 17, 2025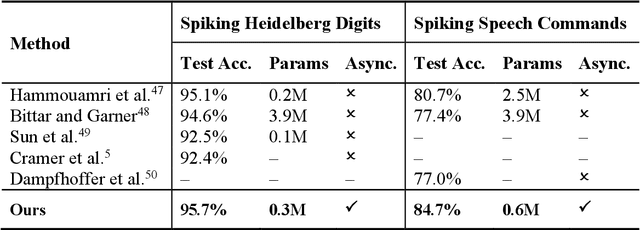
State space models (SSMs) have recently emerged as a powerful framework for long sequence processing, outperforming traditional methods on diverse benchmarks. Fundamentally, SSMs can generalize both recurrent and convolutional networks and have been shown to even capture key functions of biological systems. Here we report an approach to implement SSMs in energy-efficient compute-in-memory (CIM) hardware to achieve real-time, event-driven processing. Our work re-parameterizes the model to function with real-valued coefficients and shared decay constants, reducing the complexity of model mapping onto practical hardware systems. By leveraging device dynamics and diagonalized state transition parameters, the state evolution can be natively implemented in crossbar-based CIM systems combined with memristors exhibiting short-term memory effects. Through this algorithm and hardware co-design, we show the proposed system offers both high accuracy and high energy efficiency while supporting fully asynchronous processing for event-based vision and audio tasks.
RN-Net: Reservoir Nodes-Enabled Neuromorphic Vision Sensing Network
Mar 21, 2023Event-based cameras are inspired by the sparse and asynchronous spike representation of the biological visual system. However, processing the even data requires either using expensive feature descriptors to transform spikes into frames, or using spiking neural networks that are difficult to train. In this work, we propose a neural network architecture based on simple convolution layers integrated with dynamic temporal encoding reservoirs with low hardware and training costs. The Reservoir Nodes-enabled neuromorphic vision sensing Network (RN-Net) allows the network to efficiently process asynchronous temporal features, and achieves the highest accuracy of 99.2% for DVS128 Gesture reported to date, and one of the highest accuracy of 67.5% for DVS Lip dataset at a much smaller network size. By leveraging the internal dynamics of memristors, asynchronous temporal feature encoding can be implemented at very low hardware cost without preprocessing or dedicated memory and arithmetic units. The use of simple DNN blocks and backpropagation based training rules further reduces its implementation cost. Code will be publicly available.