Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAPReL: A Library for Active Preference-based Reward Learning Algorithms
Aug 16, 2021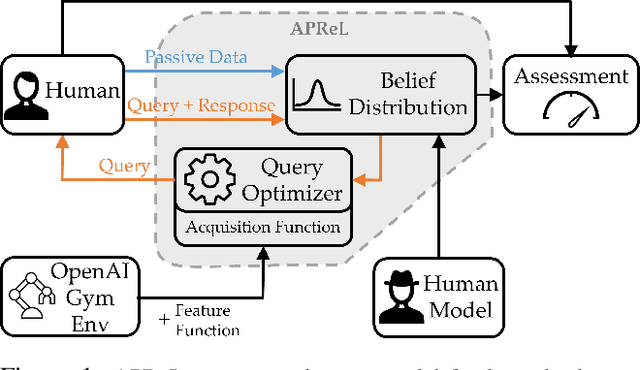
Reward learning is a fundamental problem in robotics to have robots that operate in alignment with what their human user wants. Many preference-based learning algorithms and active querying techniques have been proposed as a solution to this problem. In this paper, we present APReL, a library for active preference-based reward learning algorithms, which enable researchers and practitioners to experiment with the existing techniques and easily develop their own algorithms for various modules of the problem.
* 5 pages, 1 figures. Library is available at:
https://github.com/Stanford-ILIAD/APReL
Via