 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUse of recommendation models to provide support to dyslexic students
Mar 18, 2024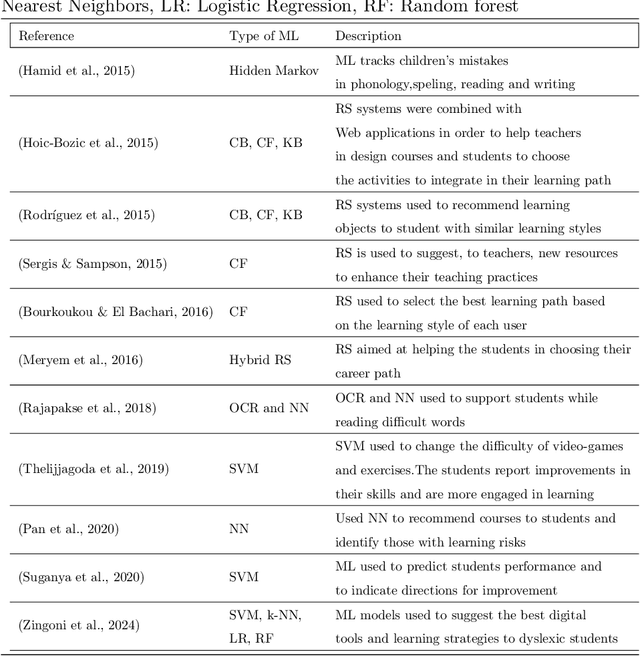
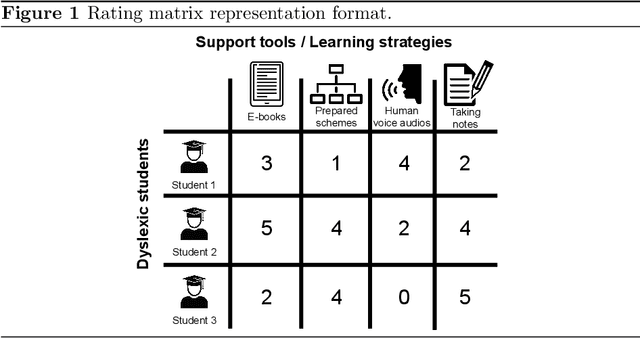
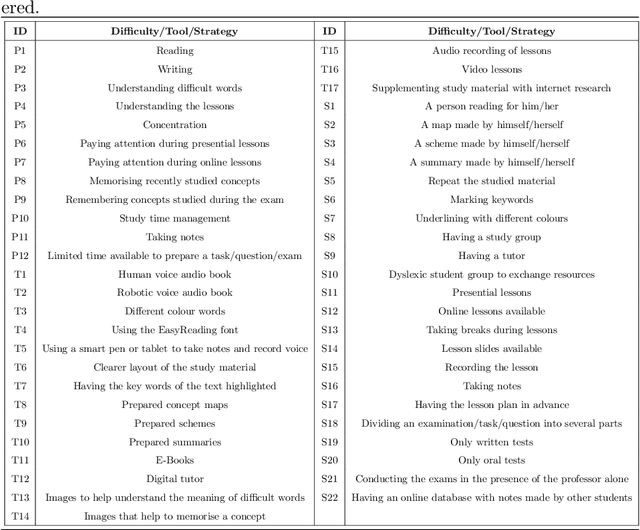
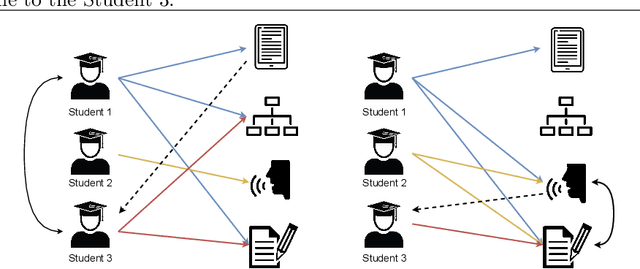
Dyslexia is the most widespread specific learning disorder and significantly impair different cognitive domains. This, in turn, negatively affects dyslexic students during their learning path. Therefore, specific support must be given to these students. In addition, such a support must be highly personalized, since the problems generated by the disorder can be very different from one to another. In this work, we explored the possibility of using AI to suggest the most suitable supporting tools for dyslexic students, so as to provide a targeted help that can be of real utility. To do this, we relied on recommendation algorithms, which are a branch of machine learning, that aim to detect personal preferences and provide the most suitable suggestions. We hence implemented and trained three collaborative-filtering recommendation models, namely an item-based, a user-based and a weighted-hybrid model, and studied their performance on a large database of 1237 students' information, collected with a self-evaluating questionnaire regarding all the most used supporting strategies and digital tools. Each recommendation model was tested with three different similarity metrics, namely Pearson correlation, Euclidean distance and Cosine similarity. The obtained results showed that a recommendation system is highly effective in suggesting the optimal help tools/strategies for everyone. This demonstrates that the proposed approach is successful and can be used as a new and effective methodology to support students with dyslexia.
Mapping and Localization from Planar Markers
Jan 25, 2017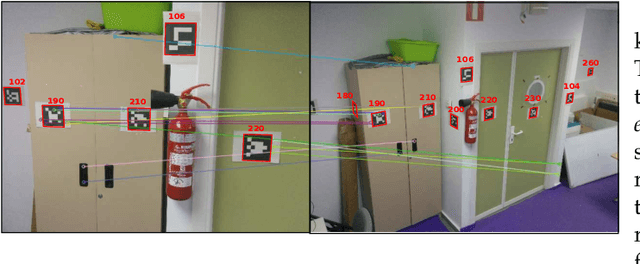
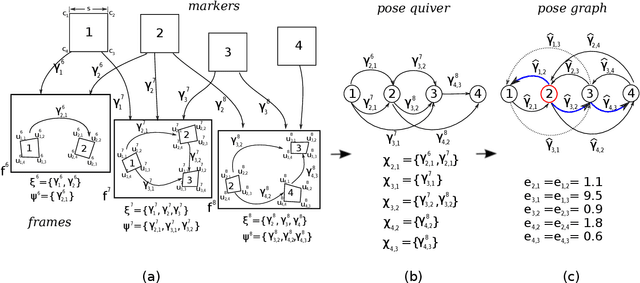

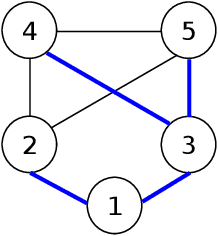
Squared planar markers are a popular tool for fast, accurate and robust camera localization, but its use is frequently limited to a single marker, or at most, to a small set of them for which their relative pose is known beforehand. Mapping and localization from a large set of planar markers is yet a scarcely treated problem in favour of keypoint-based approaches. However, while keypoint detectors are not robust to rapid motion, large changes in viewpoint, or significant changes in appearance, fiducial markers can be robustly detected under a wider range of conditions. This paper proposes a novel method to simultaneously solve the problems of mapping and localization from a set of squared planar markers. First, a quiver of pairwise relative marker poses is created, from which an initial pose graph is obtained. The pose graph may contain small pairwise pose errors, that when propagated, leads to large errors. Thus, we distribute the rotational and translational error along the basis cycles of the graph so as to obtain a corrected pose graph. Finally, we perform a global pose optimization by minimizing the reprojection errors of the planar markers in all observed frames. The experiments conducted show that our method performs better than Structure from Motion and visual SLAM techniques.