 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeColNav: Real-Time Colon Navigation for Colonoscopy
Jun 07, 2023


Colorectal cancer screening through colonoscopy continues to be the dominant global standard, as it allows identifying pre-cancerous or adenomatous lesions and provides the ability to remove them during the procedure itself. Nevertheless, failure by the endoscopist to identify such lesions increases the likelihood of lesion progression to subsequent colorectal cancer. Ultimately, colonoscopy remains operator-dependent, and the wide range of quality in colonoscopy examinations among endoscopists is influenced by variations in their technique, training, and diligence. This paper presents a novel real-time navigation guidance system for Optical Colonoscopy (OC). Our proposed system employs a real-time approach that displays both an unfolded representation of the colon and a local indicator directing to un-inspected areas. These visualizations are presented to the physician during the procedure, providing actionable and comprehensible guidance to un-surveyed areas in real-time, while seamlessly integrating into the physician's workflow. Through coverage experimental evaluation, we demonstrated that our system resulted in a higher polyp recall (PR) and high inter-rater reliability with physicians for coverage prediction. These results suggest that our real-time navigation guidance system has the potential to improve the quality and effectiveness of Optical Colonoscopy and ultimately benefit patient outcomes.
Estimating the coverage in 3d reconstructions of the colon from colonoscopy videos
Oct 19, 2022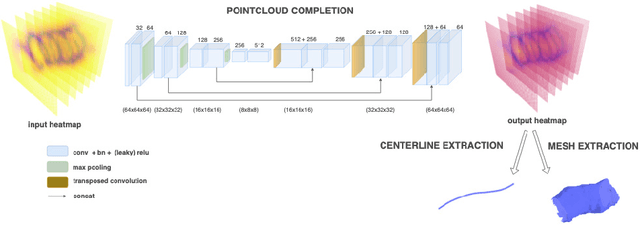
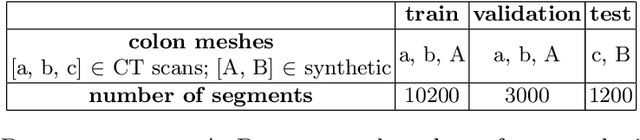
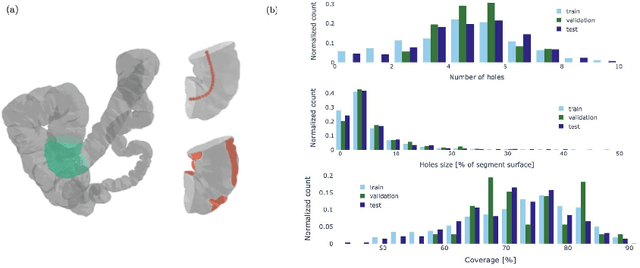
Colonoscopy is the most common procedure for early detection and removal of polyps, a critical component of colorectal cancer prevention. Insufficient visual coverage of the colon surface during the procedure often results in missed polyps. To mitigate this issue, reconstructing the 3D surfaces of the colon in order to visualize the missing regions has been proposed. However, robustly estimating the local and global coverage from such a reconstruction has not been thoroughly investigated until now. In this work, we present a new method to estimate the coverage from a reconstructed colon pointcloud. Our method splits a reconstructed colon into segments and estimates the coverage of each segment by estimating the area of the missing surfaces. We achieve a mean absolute coverage error of 3-6\% on colon segments generated from synthetic colonoscopy data and real colonography CT scans. In addition, we show good qualitative results on colon segments reconstructed from real colonoscopy videos.