 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating the coverage in 3d reconstructions of the colon from colonoscopy videos
Paper and Code
Oct 19, 2022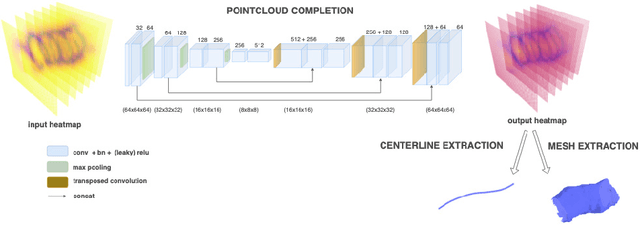
Colonoscopy is the most common procedure for early detection and removal of polyps, a critical component of colorectal cancer prevention. Insufficient visual coverage of the colon surface during the procedure often results in missed polyps. To mitigate this issue, reconstructing the 3D surfaces of the colon in order to visualize the missing regions has been proposed. However, robustly estimating the local and global coverage from such a reconstruction has not been thoroughly investigated until now. In this work, we present a new method to estimate the coverage from a reconstructed colon pointcloud. Our method splits a reconstructed colon into segments and estimates the coverage of each segment by estimating the area of the missing surfaces. We achieve a mean absolute coverage error of 3-6\% on colon segments generated from synthetic colonoscopy data and real colonography CT scans. In addition, we show good qualitative results on colon segments reconstructed from real colonoscopy videos.