 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassification of Aerial Photogrammetric 3D Point Clouds
May 23, 2017
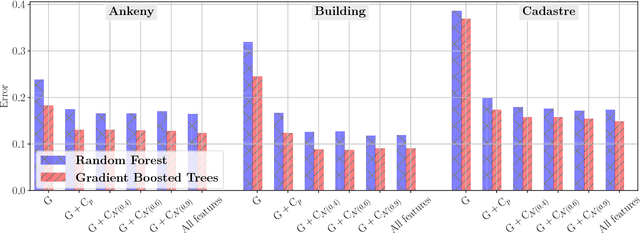
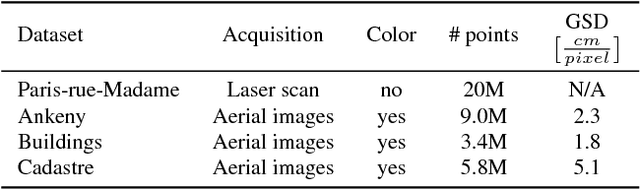

We present a powerful method to extract per-point semantic class labels from aerialphotogrammetry data. Labeling this kind of data is important for tasks such as environmental modelling, object classification and scene understanding. Unlike previous point cloud classification methods that rely exclusively on geometric features, we show that incorporating color information yields a significant increase in accuracy in detecting semantic classes. We test our classification method on three real-world photogrammetry datasets that were generated with Pix4Dmapper Pro, and with varying point densities. We show that off-the-shelf machine learning techniques coupled with our new features allow us to train highly accurate classifiers that generalize well to unseen data, processing point clouds containing 10 million points in less than 3 minutes on a desktop computer.
From Bits to Images: Inversion of Local Binary Descriptors
Nov 06, 2012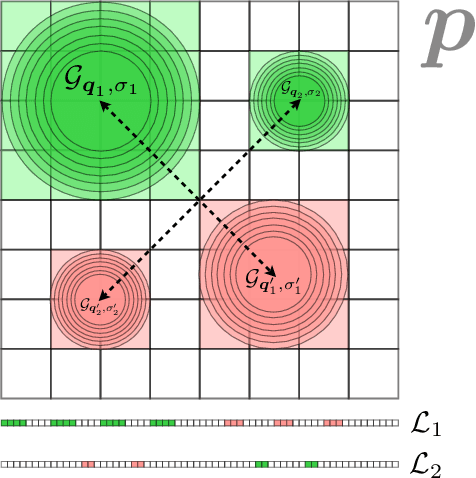
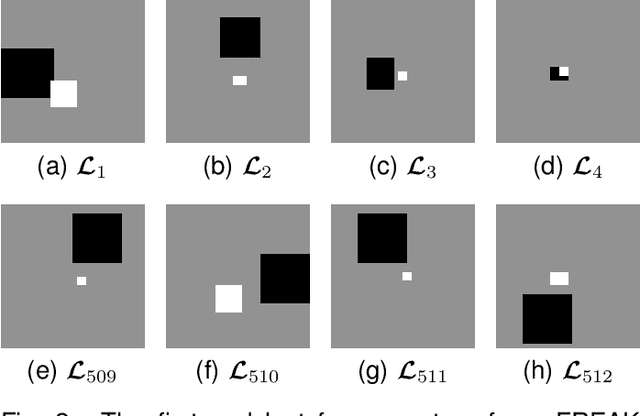

Local Binary Descriptors are becoming more and more popular for image matching tasks, especially when going mobile. While they are extensively studied in this context, their ability to carry enough information in order to infer the original image is seldom addressed. In this work, we leverage an inverse problem approach to show that it is possible to directly reconstruct the image content from Local Binary Descriptors. This process relies on very broad assumptions besides the knowledge of the pattern of the descriptor at hand. This generalizes previous results that required either a prior learning database or non-binarized features. Furthermore, our reconstruction scheme reveals differences in the way different Local Binary Descriptors capture and encode image information. Hence, the potential applications of our work are multiple, ranging from privacy issues caused by eavesdropping image keypoints streamed by mobile devices to the design of better descriptors through the visualization and the analysis of their geometric content.