 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSatSplatYOLO: 3D Gaussian Splatting-based Virtual Object Detection Ensembles for Satellite Feature Recognition
Jun 04, 2024
On-orbit servicing (OOS), inspection of spacecraft, and active debris removal (ADR). Such missions require precise rendezvous and proximity operations in the vicinity of non-cooperative, possibly unknown, resident space objects. Safety concerns with manned missions and lag times with ground-based control necessitate complete autonomy. In this article, we present an approach for mapping geometries and high-confidence detection of components of unknown, non-cooperative satellites on orbit. We implement accelerated 3D Gaussian splatting to learn a 3D representation of the satellite, render virtual views of the target, and ensemble the YOLOv5 object detector over the virtual views, resulting in reliable, accurate, and precise satellite component detections. The full pipeline capable of running on-board and stand to enable downstream machine intelligence tasks necessary for autonomous guidance, navigation, and control tasks.
Characterizing Satellite Geometry via Accelerated 3D Gaussian Splatting
Jan 05, 2024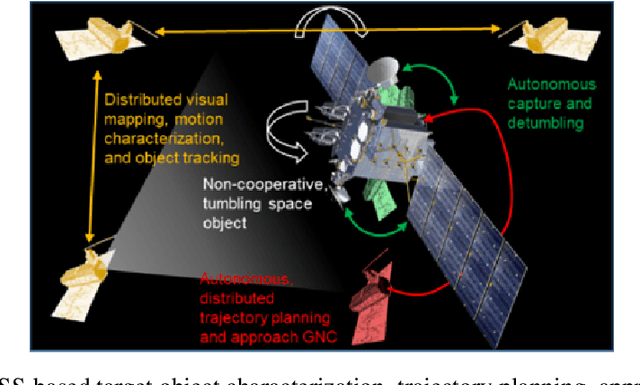

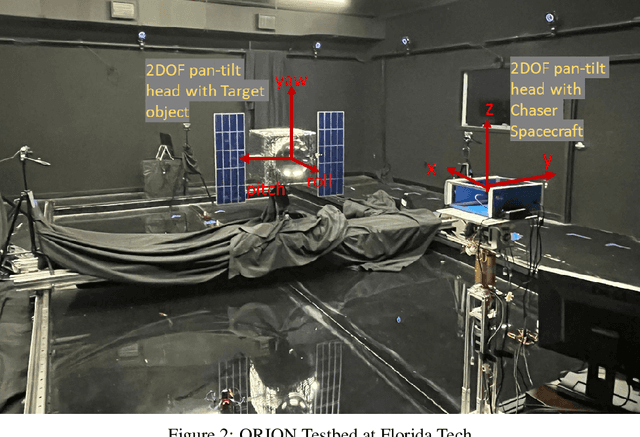

The accelerating deployment of spacecraft in orbit have generated interest in on-orbit servicing (OOS), inspection of spacecraft, and active debris removal (ADR). Such missions require precise rendezvous and proximity operations in the vicinity of non-cooperative, possible unknown, resident space objects. Safety concerns with manned missions and lag times with ground-based control necessitate complete autonomy. This requires robust characterization of the target's geometry. In this article, we present an approach for mapping geometries of satellites on orbit based on 3D Gaussian Splatting that can run on computing resources available on current spaceflight hardware. We demonstrate model training and 3D rendering performance on a hardware-in-the-loop satellite mock-up under several realistic lighting and motion conditions. Our model is shown to be capable of training on-board and rendering higher quality novel views of an unknown satellite nearly 2 orders of magnitude faster than previous NeRF-based algorithms. Such on-board capabilities are critical to enable downstream machine intelligence tasks necessary for autonomous guidance, navigation, and control tasks.