 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWalking on TacTip toes: A tactile sensing foot for walking robots
Aug 12, 2020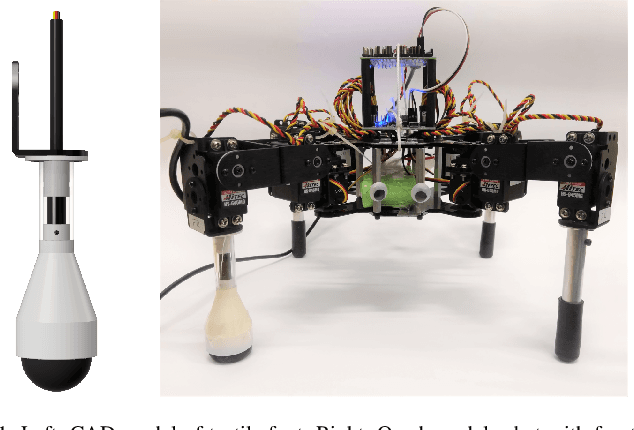
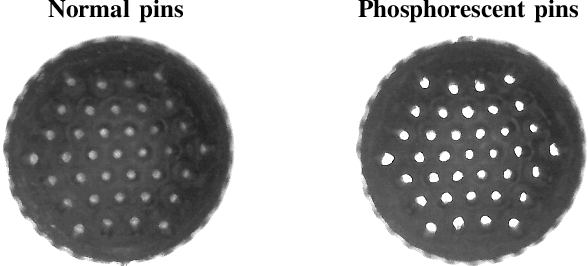
Little research into tactile feet has been done for walking robots despite the benefits such feedback could give when walking on uneven terrain. This paper describes the development of a simple, robust and inexpensive tactile foot for legged robots based on a high-resolution biomimetic TacTip tactile sensor. Several design improvements were made to facilitate tactile sensing while walking, including the use of phosphorescent markers to remove the need for internal LED lighting. The usefulness of the foot is verified on a quadrupedal robot performing a beam walking task and it is found the sensor prevents the robot falling off the beam. Further, this capability also enables the robot to walk along the edge of a curved table. This tactile foot design can be easily modified for use with any legged robot, including much larger walking robots, enabling stable walking in challenging terrain.
Learning to Live Life on the Edge: Online Learning for Data-Efficient Tactile Contour Following
Sep 12, 2019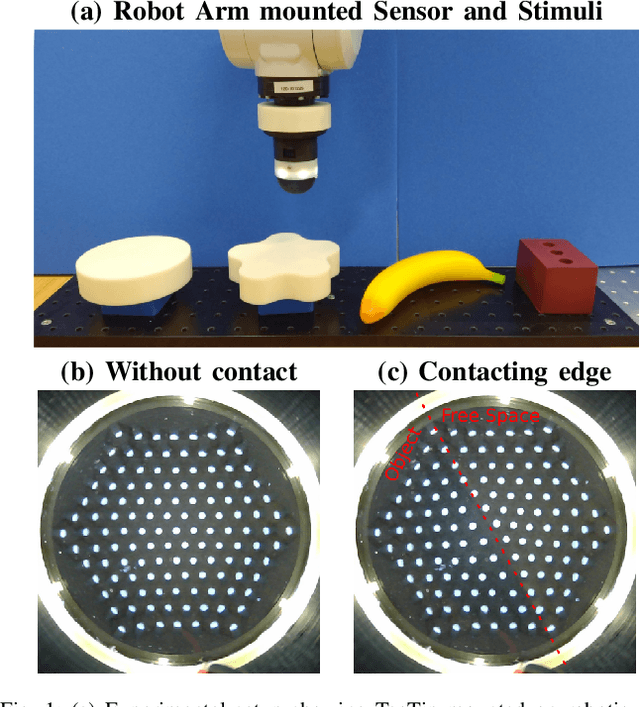

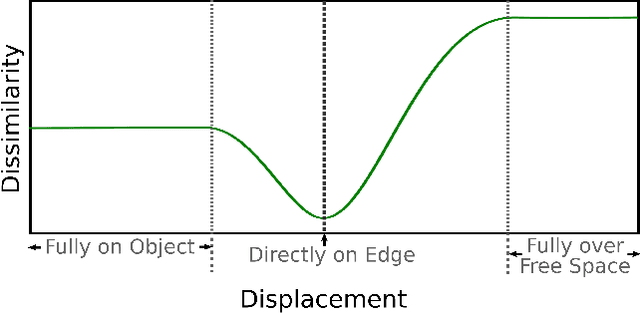
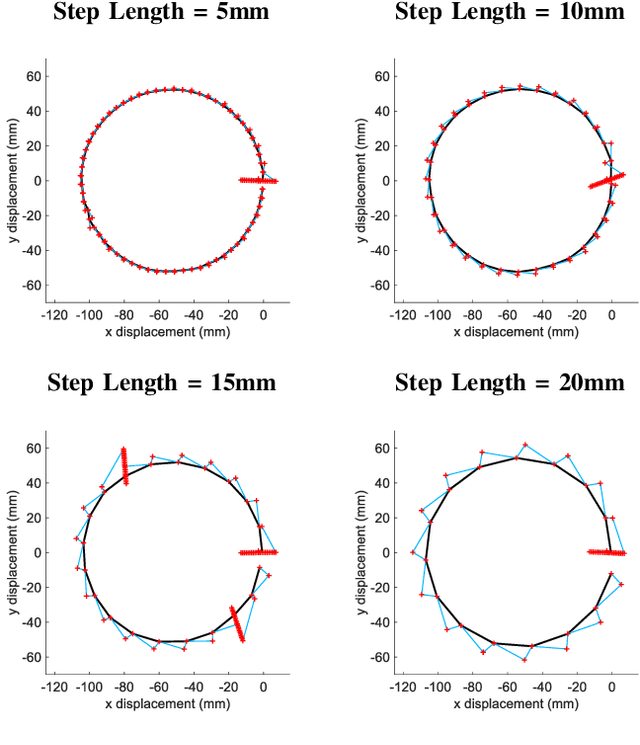
Tactile sensing has been used for a variety of robotic exploration and manipulation tasks but a common constraint is a requirement for a large amount of training data. This paper addresses the issue of data-efficiency by proposing a novel method for online learning based on a Gaussian Process Latent Variable Model (GP-LVM), whereby the robot learns from tactile data whilst performing a contour following task thus enabling generalisation to a wide variety of stimuli. The results show that contour following is successful with very little data and is robust to novel stimuli. This work highlights that even with a simple learning architecture there are significant advantages to be gained in efficient and robust task performance by using latent variable models and online learning for tactile sensing tasks. This paves the way for a new generation of robust, fast, and data-efficient tactile systems.