 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystematic Literature Review of Vision-Based Approaches to Outdoor Livestock Monitoring with Lessons from Wildlife Studies
Oct 07, 2024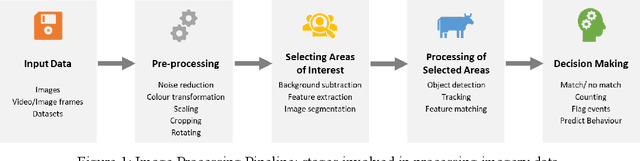
Precision livestock farming (PLF) aims to improve the health and welfare of livestock animals and farming outcomes through the use of advanced technologies. Computer vision, combined with recent advances in machine learning and deep learning artificial intelligence approaches, offers a possible solution to the PLF ideal of 24/7 livestock monitoring that helps facilitate early detection of animal health and welfare issues. However, a significant number of livestock species are raised in large outdoor habitats that pose technological challenges for computer vision approaches. This review provides a comprehensive overview of computer vision methods and open challenges in outdoor animal monitoring. We include research from both the livestock and wildlife fields in the review because of the similarities in appearance, behaviour, and habitat for many livestock and wildlife. We focus on large terrestrial mammals, such as cattle, horses, deer, goats, sheep, koalas, giraffes, and elephants. We use an image processing pipeline to frame our discussion and highlight the current capabilities and open technical challenges at each stage of the pipeline. The review found a clear trend towards the use of deep learning approaches for animal detection, counting, and multi-species classification. We discuss in detail the applicability of current vision-based methods to PLF contexts and promising directions for future research.
FJMP: Factorized Joint Multi-Agent Motion Prediction over Learned Directed Acyclic Interaction Graphs
Nov 27, 2022



Predicting the future motion of road agents is a critical task in an autonomous driving pipeline. In this work, we address the problem of generating a set of scene-level, or joint, future trajectory predictions in multi-agent driving scenarios. To this end, we propose FJMP, a Factorized Joint Motion Prediction framework for multi-agent interactive driving scenarios. FJMP models the future scene interaction dynamics as a sparse directed interaction graph, where edges denote explicit interactions between agents. We then prune the graph into a directed acyclic graph (DAG) and decompose the joint prediction task into a sequence of marginal and conditional predictions according to the partial ordering of the DAG, where joint future trajectories are decoded using a directed acyclic graph neural network (DAGNN). We conduct experiments on the INTERACTION and Argoverse 2 datasets and demonstrate that FJMP produces more accurate and scene-consistent joint trajectory predictions than non-factorized approaches, especially on the most interactive and kinematically interesting agents. FJMP ranks 1st on the multi-agent test leaderboard of the INTERACTION dataset.