 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElly: A Real-Time Failure Recovery and Data Collection System for Robotic Manipulation
Aug 25, 2022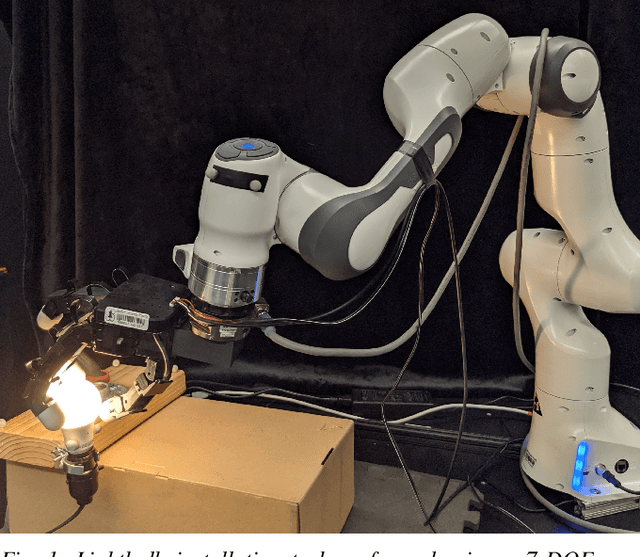
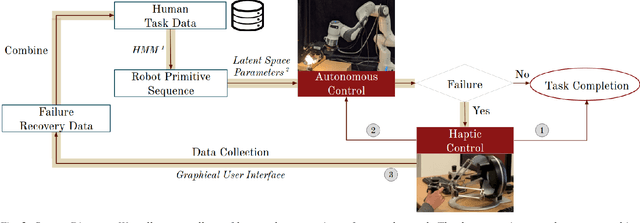
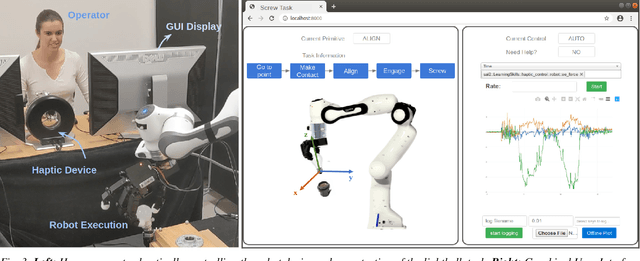
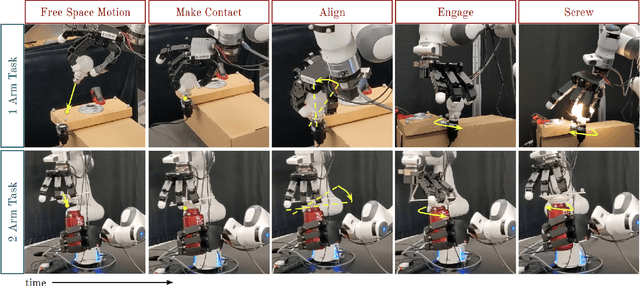
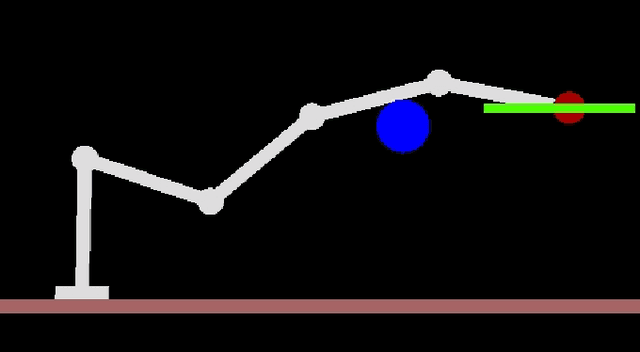
Even the most robust autonomous behaviors can fail. The goal of this research is to both recover and collect data from failures, during autonomous task execution, so they can be prevented in the future. We propose haptic intervention for real-time failure recovery and data collection. Elly is a system that allows for seamless transitions between autonomous robot behaviors and human intervention while collecting sensory information from the human's recovery strategy. The system and our design choices were experimentally validated on a single arm task -- installing a lightbulb in a socket -- and a bimanual task -- screwing a cap on a bottle -- using two 7-DOF manipulators equipped 4-finger grippers. In these examples, Elly achieved over 80% task completion during a total of 40 runs.
Real Time Collision Detection and Identification for Robotic Manipulators
Feb 02, 2018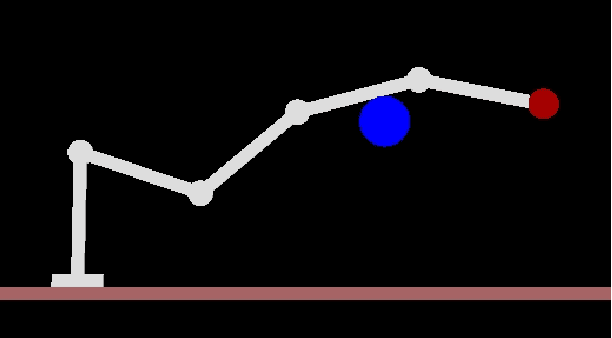
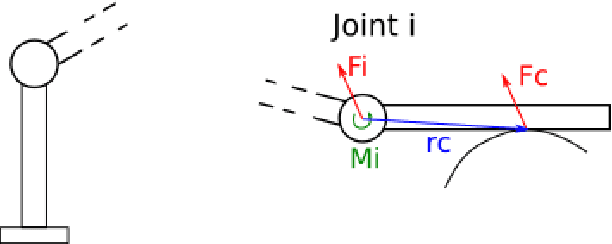
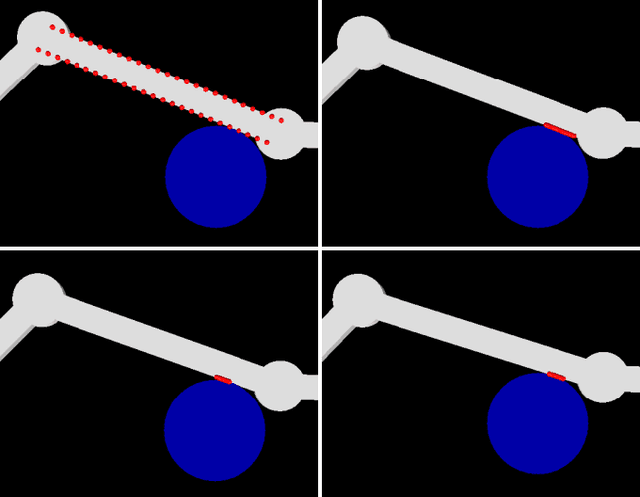
The majority of everyday tasks involve interacting with unstructured environments. This implies that, in order for robots to be truly useful they must be able to handle contacts. This paper explores how a particle filter can be used to localize a contact point and estimate the external force. We demonstrate the capability of the particle filter on a simulated 4DoF planar robotic arm, and compare it to a well-established analytical approach.
Retractable Prosthesis for Transfemoral Amputees Using Series Elastic Actuators and Force Control
Nov 30, 2015
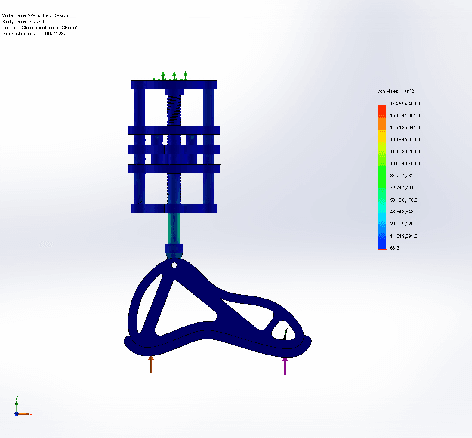
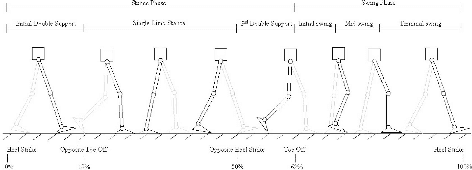
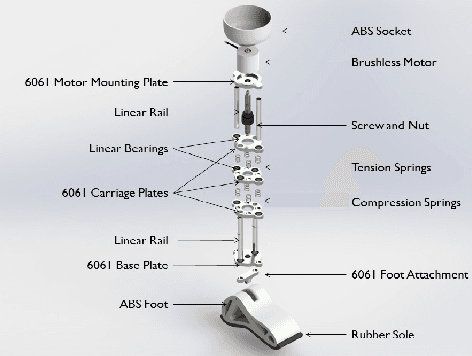
We present a highly functional and cost-effective prosthesis for transfemoral amputees that uses series elastic actuators. These actuators allow for accurate force control, low impedance and large dynamic range. The design involves one active joint at the knee and a passive joint at the ankle. Additionally, the socket was designed using mirroring of compliances to ensure maximum comfort.