 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling, Design Optimization and Prototype development of Knee Exoskeleton
Sep 04, 2024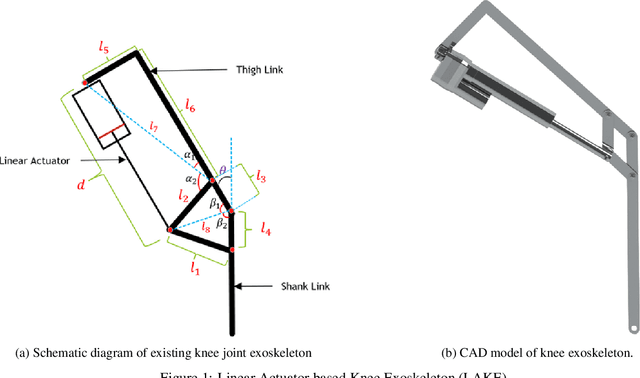

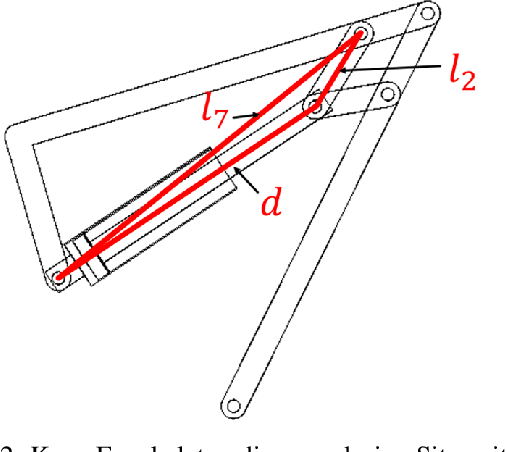
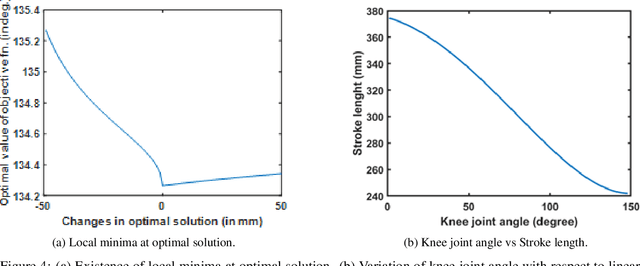
This study focuses on enhancing the design of an existing knee exoskeleton by addressing limitations in the range of motion (ROM) during Sit-to-Stand (STS) motions. While current knee exoskeletons emphasize toughness and rehabilitation, their closed-loop mechanisms hinder optimal ROM, which is crucial for effective rehabilitation. This research aims to optimize the exoskeleton design to achieve the necessary ROM, improving its functionality in rehabilitation. This can be achieved by utilizing kinematic modeling and formulation, the existing design was represented in the non-linear and non-convex mathematical functions. Optimization techniques, considering constraints based on human leg measurements, were applied to determine the best dimensions for the exoskeleton. This resulted in a significant increase in ROM compared to existing models. A MATLAB program was developed to compare the ROM of the optimized exoskeleton with the original design. To validate the practicality of the optimized design, analysis was conducted using a mannequin with average human dimensions, followed by constructing a cardboard dummy model to confirm simulation results. The STS motion of an average human was captured using a camera and TRACKER software, and the motion was compared with that of the dummy model to identify any misalignments between the human and exoskeleton knee joints. Furthermore, a prototype of the knee joint exoskeleton is being developed to further investigate misalignments and improve the design. Future work includes the use of EMG sensors for more detailed analysis and better results.
Optimal Compositions using Unconventional Modular Library for Customized Manipulators
May 14, 2023This paper presents an optimization approach for generating custom manipulator configurations using a proposed unconventional modular library. An end-to-end solution is presented in which the resulting optimal models of the modular compositions can be integrated directly with the Robot Operating System platform. The approach utilizes an unconventional modular library, which is adaptable to a wide range of parameters for customization including non-parallel and non-perpendicular joint axes, and the unified modeling technique for getting the custom modular configurations. The single objective function optimization problem is formulated based upon the discrete parameters of reconfiguration depending upon the available modular library such as, number of joint modules, skew-twist angle, intersecting-twist angle, connection ports of the module, module size, modular sub-assembly unit and curved links. Two case studies, including an application to the agricultural vertical farms, are presented to validate the results.
Unified Modeling of Unconventional Modular and Reconfigurable Manipulation System
Nov 22, 2021



Customization of manipulator configurations using modularity and reconfigurability aspects is receiving much attention. Modules presented so far in literature deals with the conventional and standard configurations. This paper presents the 3D printable, light-weight and unconventional modules: MOIRs' Mark-2, to develop any custom `n'-Degrees-of-Freedom (DoF) serial manipulator even with the non-parallel and non-perpendicular jointed configuration. These unconventional designs of modular configurations seek an easy adaptable solution for both modular assembly and software interfaces for automatic modeling and control. A strategy of assembling the modules, automatic and unified modeling of the modular and reconfigurable manipulators with unconventional parameters is proposed in this paper using the proposed 4 modular units. A reconfigurable software architecture is presented for the automatic generation of kinematic and dynamic models and configuration files, through which, a designer can design, validate using visualization, plan and execute the motion of the developed configuration as required. The framework developed is based upon an open source platform called as Robot Operating System (ROS), which acts as a digital twin for the modular configurations. For the experimental demonstration, a 3D printed modular library is developed and an unconventional configuration is assembled, using the proposed modules followed by automatic modeling and control, for a single cell of the vertical farm setup.
Integrated Modular Solution for Task Oriented Manipulator Configuration Design
Oct 31, 2021


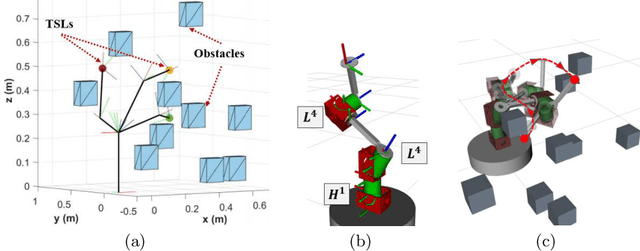
Modular and reconfigurable robotic systems have been designed to provide a customized solution for the non-repetitive tasks to be performed in a constrained environment. Customized solutions are normally extracted from task-based optimization of the possible manipulator configurations but the solution are not integrated, for providing the modular compositions directly. In this work, in the first phase, a strategy of finding unconventional optimal configurations with minimal number of degrees-of-freedom are discussed based upon the prescribed working locations and the cluttered environment. Then, in the second phase, design of the modular and reconfigurable architecture is presented which can adapt these unconventional robotic parameters. Rather than generating and evolving the modular compositions, a strategy is presented through which the unconventional optimal configurations can be mapped directly to the modular compositions. The generated modular composition is validated using Robot Operating System for the motion planning between the prescribed working locations in a given cluttered environment.
Speech-Gesture Mapping and Engagement Evaluation in Human Robot Interaction
Dec 09, 2018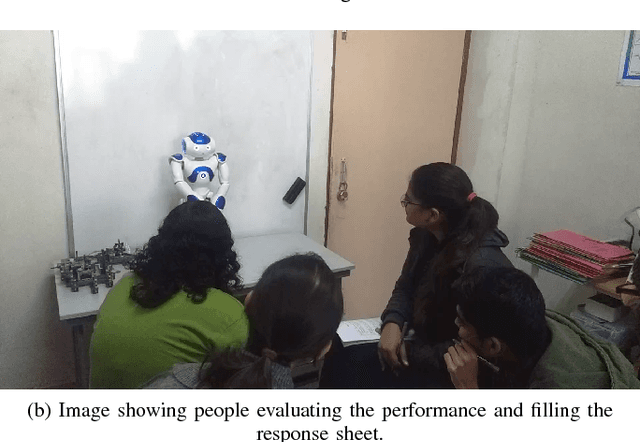
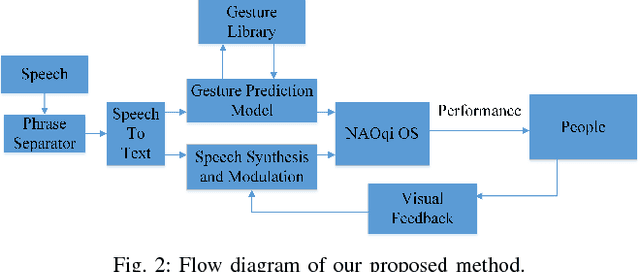
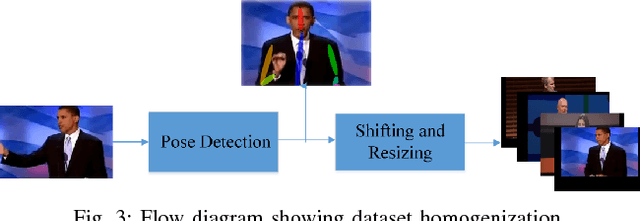
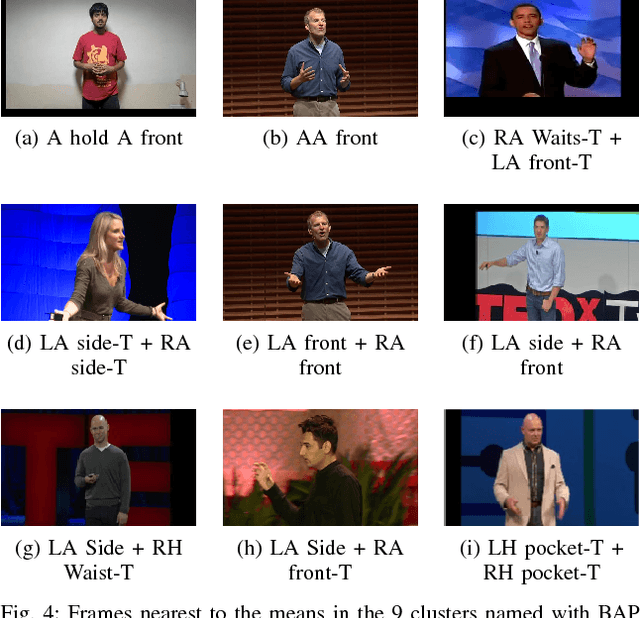
A robot needs contextual awareness, effective speech production and complementing non-verbal gestures for successful communication in society. In this paper, we present our end-to-end system that tries to enhance the effectiveness of non-verbal gestures. For achieving this, we identified prominently used gestures in performances by TED speakers and mapped them to their corresponding speech context and modulated speech based upon the attention of the listener. The proposed method utilized Convolutional Pose Machine [4] to detect the human gesture. Dominant gestures of TED speakers were used for learning the gesture-to-speech mapping. The speeches by them were used for training the model. We also evaluated the engagement of the robot with people by conducting a social survey. The effectiveness of the performance was monitored by the robot and it self-improvised its speech pattern on the basis of the attention level of the audience, which was calculated using visual feedback from the camera. The effectiveness of interaction as well as the decisions made during improvisation was further evaluated based on the head-pose detection and interaction survey.