 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Modular Solution for Task Oriented Manipulator Configuration Design
Paper and Code
Oct 31, 2021


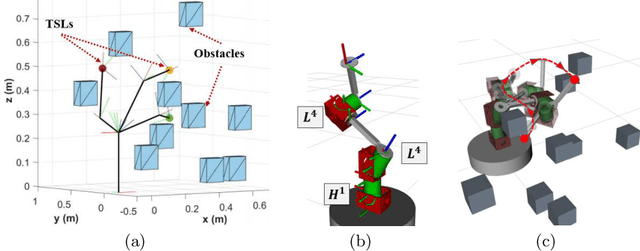
Modular and reconfigurable robotic systems have been designed to provide a customized solution for the non-repetitive tasks to be performed in a constrained environment. Customized solutions are normally extracted from task-based optimization of the possible manipulator configurations but the solution are not integrated, for providing the modular compositions directly. In this work, in the first phase, a strategy of finding unconventional optimal configurations with minimal number of degrees-of-freedom are discussed based upon the prescribed working locations and the cluttered environment. Then, in the second phase, design of the modular and reconfigurable architecture is presented which can adapt these unconventional robotic parameters. Rather than generating and evolving the modular compositions, a strategy is presented through which the unconventional optimal configurations can be mapped directly to the modular compositions. The generated modular composition is validated using Robot Operating System for the motion planning between the prescribed working locations in a given cluttered environment.