 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Efficiency of the Neuro-Fuzzy Classifier for User Knowledge Modeling Systems
Oct 26, 2019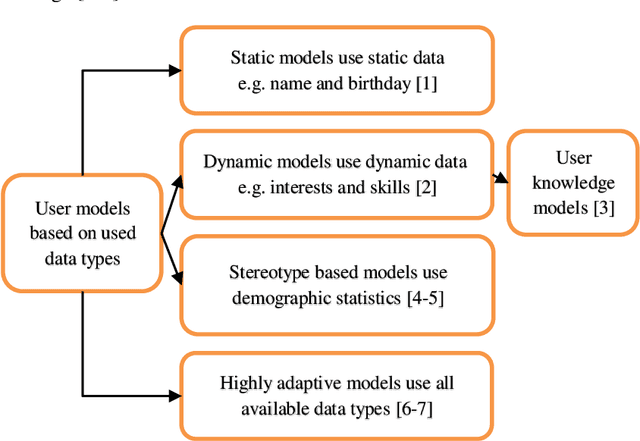
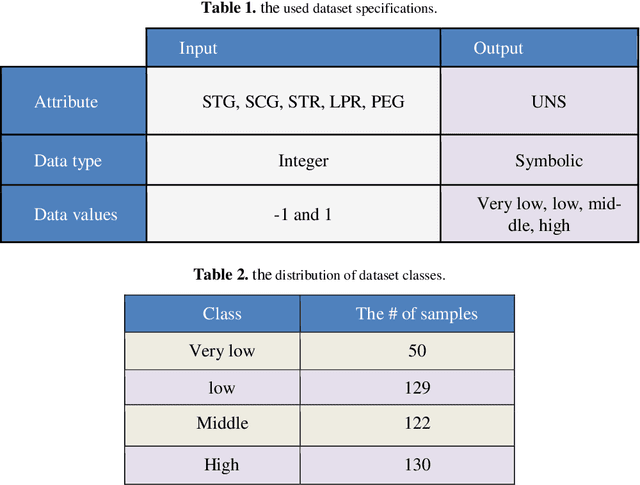

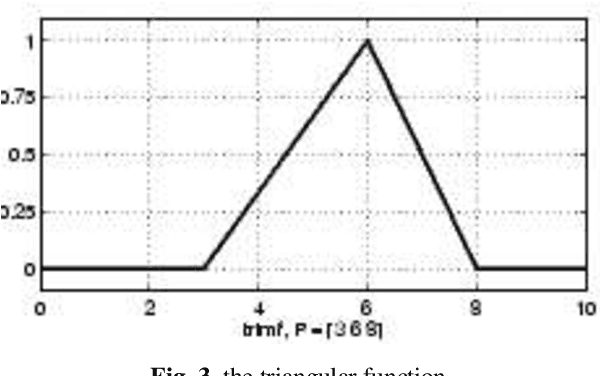
User knowledge modeling systems are used as the most effective technology for grabbing new user's attention. Moreover, the quality of service (QOS) is increased by these intelligent services. This paper proposes two user knowledge classifiers based on artificial neural networks used as one of the influential parts of knowledge modeling systems. We employed multi-layer perceptron (MLP) and adaptive neural fuzzy inference system (ANFIS) as the classifiers. Moreover, we used real data contains the user's degree of study time, repetition number, their performance in exam, as well as the learning percentage, as our classifier's inputs. Compared with well-known methods like KNN and Bayesian classifiers used in other research with the same data sets, our experiments present better performance. Although, the number of samples in the train set is not large enough, the performance of the neuro-fuzzy classifier in the test set is 98.6% which is the best result in comparison with others. However, the comparison of MLP toward the ANFIS results presents performance reduction, although the MLP performance is more efficient than other methods like Bayesian and KNN. As our goal is evaluating and reporting the efficiency of a neuro-fuzzy classifier for user knowledge modeling systems, we utilized many different evaluation metrics such as Receiver Operating Characteristic and the Area Under its Curve, Total Accuracy, and Kappa statistics.
D-Point Trigonometric Path Planning based on Q-Learning in Uncertain Environments
Oct 26, 2019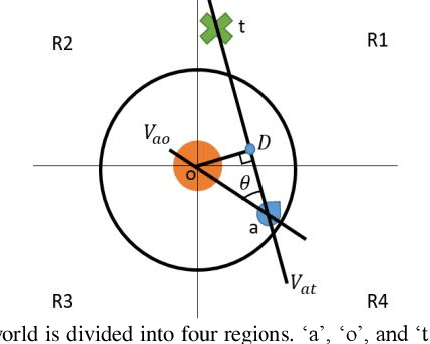
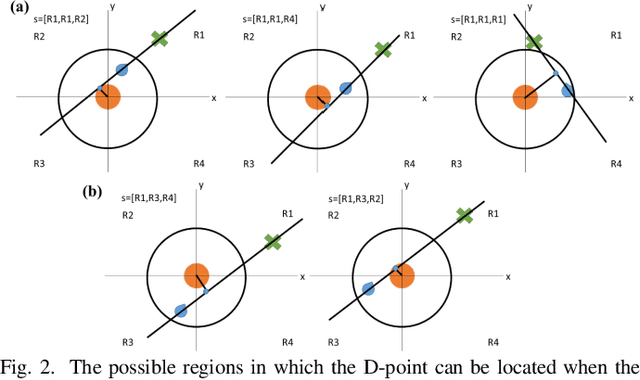
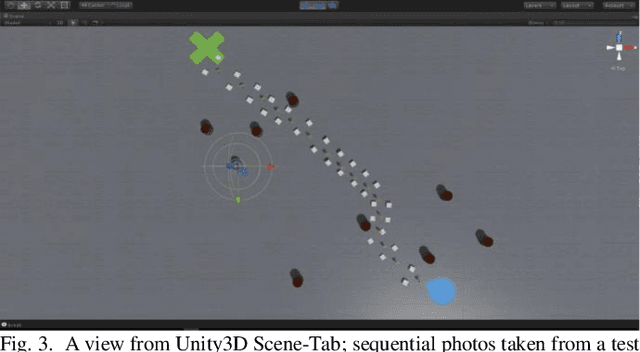
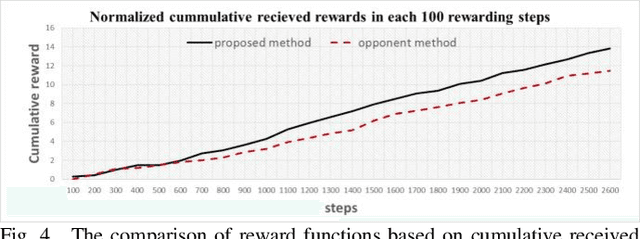
Finding the optimum path for a robot for moving from start to the goal position through obstacles is still a challenging issue. This paper presents a novel path planning method, named D-point trigonometric, based on Q-learning algorithm for dynamic and uncertain environments, in which all the obstacles and the target are moving. We define a new state, action and reward functions for the Q-learning by which the agent can find the best action in every state to reach the goal in the most appropriate path. The D-point approach minimizes the possible number of states. Moreover, the experiments in Unity3D confirmed the high convergence speed, the high hit rate, as well as the low dependency on environmental parameters of the proposed method compared with an opponent approach.