 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD-Point Trigonometric Path Planning based on Q-Learning in Uncertain Environments
Paper and Code
Oct 26, 2019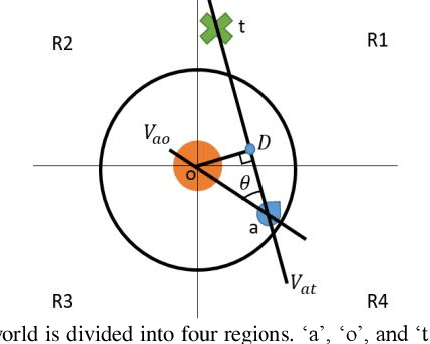
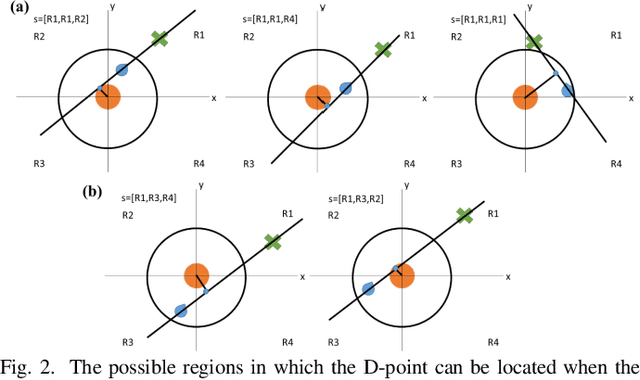
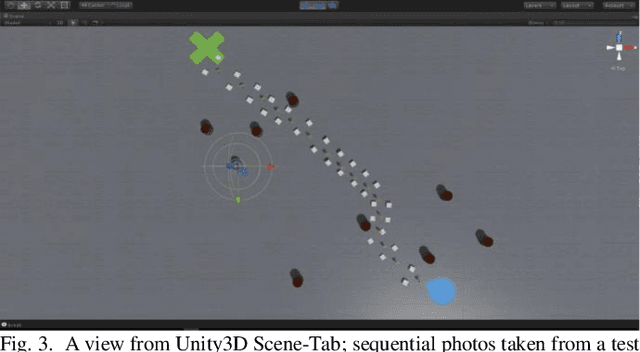
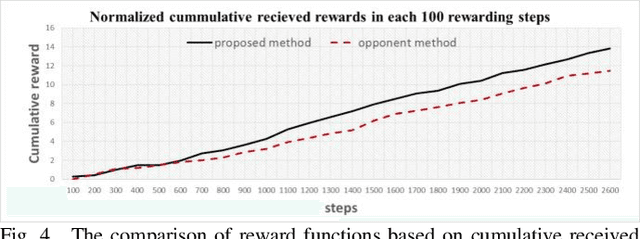
Finding the optimum path for a robot for moving from start to the goal position through obstacles is still a challenging issue. This paper presents a novel path planning method, named D-point trigonometric, based on Q-learning algorithm for dynamic and uncertain environments, in which all the obstacles and the target are moving. We define a new state, action and reward functions for the Q-learning by which the agent can find the best action in every state to reach the goal in the most appropriate path. The D-point approach minimizes the possible number of states. Moreover, the experiments in Unity3D confirmed the high convergence speed, the high hit rate, as well as the low dependency on environmental parameters of the proposed method compared with an opponent approach.