 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLess Is More: Robust Robot Learning via Partially Observable Multi-Agent Reinforcement Learning
Sep 26, 2023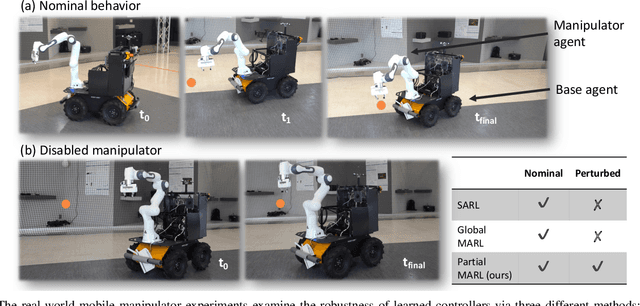
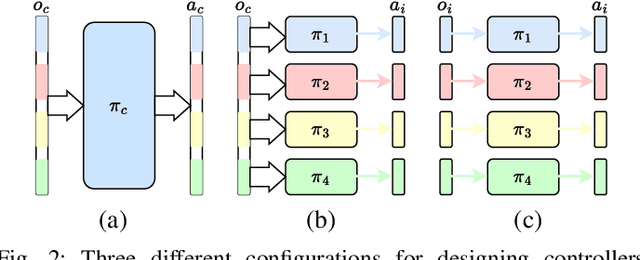
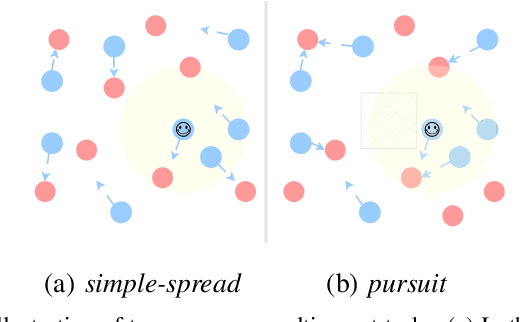
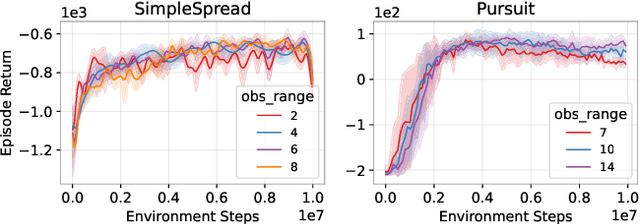
In many multi-agent and high-dimensional robotic tasks, the controller can be designed in either a centralized or decentralized way. Correspondingly, it is possible to use either single-agent reinforcement learning (SARL) or multi-agent reinforcement learning (MARL) methods to learn such controllers. However, the relationship between these two paradigms remains under-studied in the literature. This work explores research questions in terms of robustness and performance of SARL and MARL approaches to the same task, in order to gain insight into the most suitable methods. We start by analytically showing the equivalence between these two paradigms under the full-state observation assumption. Then, we identify a broad subclass of \textit{Dec-POMDP} tasks where the agents are weakly or partially interacting. In these tasks, we show that partial observations of each agent are sufficient for near-optimal decision-making. Furthermore, we propose to exploit such partially observable MARL to improve the robustness of robots when joint or agent failures occur. Our experiments on both simulated multi-agent tasks and a real robot task with a mobile manipulator validate the presented insights and the effectiveness of the proposed robust robot learning method via partially observable MARL.