 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVulnerable Road User Detection and Safety Enhancement: A Comprehensive Survey
May 29, 2024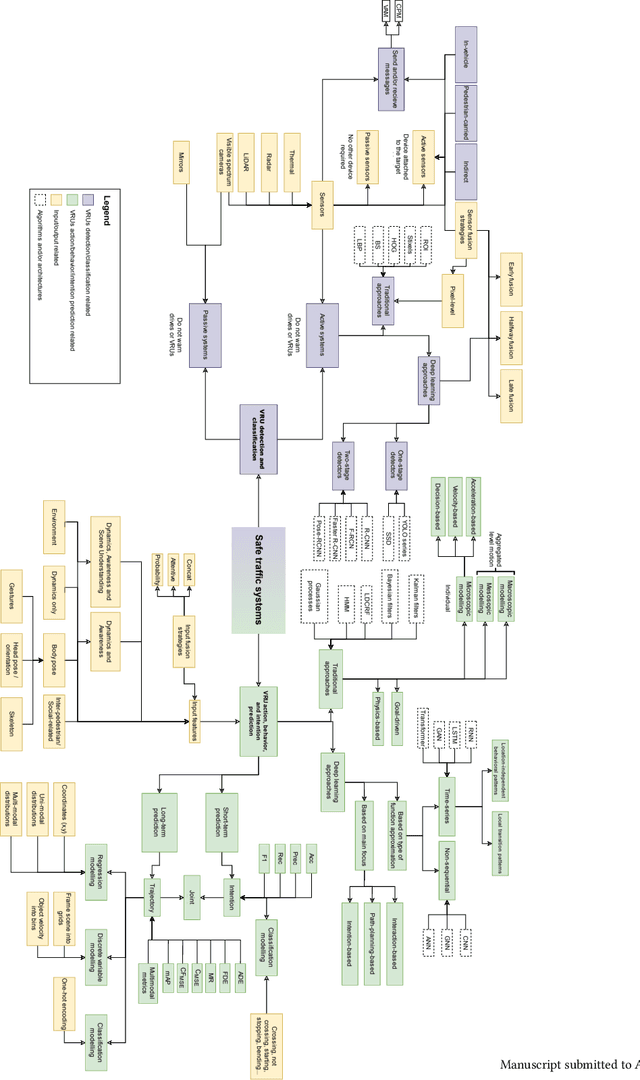
Traffic incidents involving vulnerable road users (VRUs) constitute a significant proportion of global road accidents. Advances in traffic communication ecosystems, coupled with sophisticated signal processing and machine learning techniques, have facilitated the utilization of data from diverse sensors. Despite these advancements and the availability of extensive datasets, substantial progress is required to mitigate traffic casualties. This paper provides a comprehensive survey of state-of-the-art technologies and methodologies to enhance the safety of VRUs. The study delves into the communication networks between vehicles and VRUs, emphasizing the integration of advanced sensors and the availability of relevant datasets. It explores preprocessing techniques and data fusion methods to enhance sensor data quality. Furthermore, our study assesses critical simulation environments essential for developing and testing VRU safety systems. Our research also highlights recent advances in VRU detection and classification algorithms, addressing challenges such as variable environmental conditions. Additionally, we cover cutting-edge research in predicting VRU intentions and behaviors, which is crucial for proactive collision avoidance strategies. Through this survey, we aim to provide a comprehensive understanding of the current landscape of VRU safety technologies, identifying areas of progress and areas needing further research and development.
Generation of Realistic Synthetic Raw Radar Data for Automated Driving Applications using Generative Adversarial Networks
Aug 08, 2023The main approaches for simulating FMCW radar are based on ray tracing, which is usually computationally intensive and do not account for background noise. This work proposes a faster method for FMCW radar simulation capable of generating synthetic raw radar data using generative adversarial networks (GAN). The code and pre-trained weights are open-source and available on GitHub. This method generates 16 simultaneous chirps, which allows the generated data to be used for the further development of algorithms for processing radar data (filtering and clustering). This can increase the potential for data augmentation, e.g., by generating data in non-existent or safety-critical scenarios that are not reproducible in real life. In this work, the GAN was trained with radar measurements of a motorcycle and used to generate synthetic raw radar data of a motorcycle traveling in a straight line. For generating this data, the distance of the motorcycle and Gaussian noise are used as input to the neural network. The synthetic generated radar chirps were evaluated using the Frechet Inception Distance (FID). Then, the Range-Azimuth (RA) map is calculated twice: first, based on synthetic data using this GAN and, second, based on real data. Based on these RA maps, an algorithm with adaptive threshold and edge detection is used for object detection. The results have shown that the data is realistic in terms of coherent radar reflections of the motorcycle and background noise based on the comparison of chirps, the RA maps and the object detection results. Thus, the proposed method in this work has shown to minimize the simulation-to-reality gap for the generation of radar data.