 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgo-Lane Analysis System (ELAS): Dataset and Algorithms
Jun 15, 2018
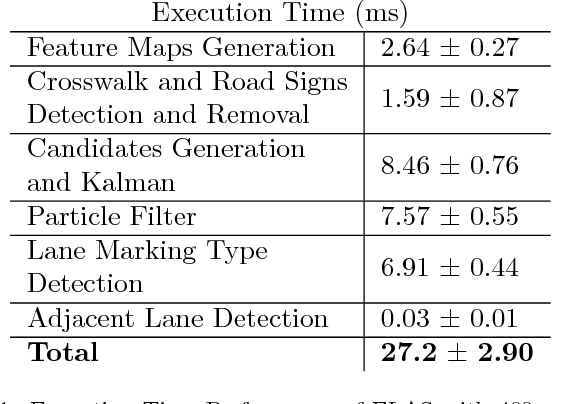
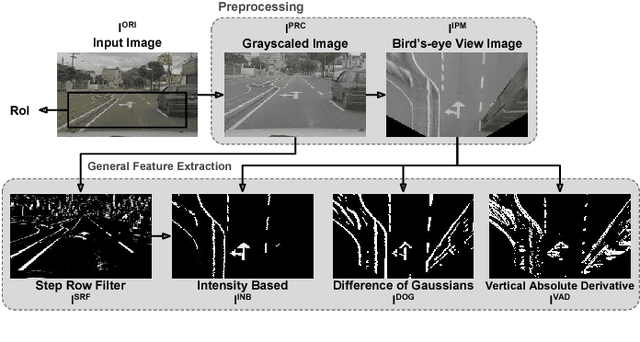
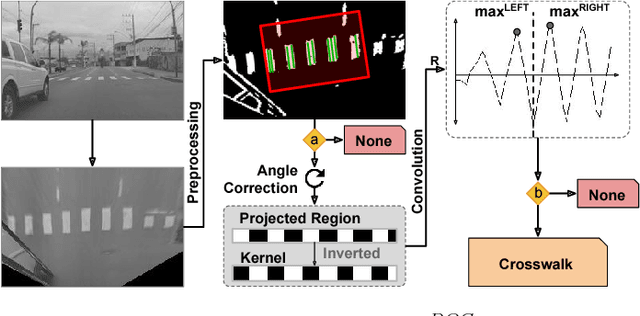
Decreasing costs of vision sensors and advances in embedded hardware boosted lane related research detection, estimation, and tracking in the past two decades. The interest in this topic has increased even more with the demand for advanced driver assistance systems (ADAS) and self-driving cars. Although extensively studied independently, there is still need for studies that propose a combined solution for the multiple problems related to the ego-lane, such as lane departure warning (LDW), lane change detection, lane marking type (LMT) classification, road markings detection and classification, and detection of adjacent lanes (i.e., immediate left and right lanes) presence. In this paper, we propose a real-time Ego-Lane Analysis System (ELAS) capable of estimating ego-lane position, classifying LMTs and road markings, performing LDW and detecting lane change events. The proposed vision-based system works on a temporal sequence of images. Lane marking features are extracted in perspective and Inverse Perspective Mapping (IPM) images that are combined to increase robustness. The final estimated lane is modeled as a spline using a combination of methods (Hough lines with Kalman filter and spline with particle filter). Based on the estimated lane, all other events are detected. To validate ELAS and cover the lack of lane datasets in the literature, a new dataset with more than 20 different scenes (in more than 15,000 frames) and considering a variety of scenarios (urban road, highways, traffic, shadows, etc.) was created. The dataset was manually annotated and made publicly available to enable evaluation of several events that are of interest for the research community (i.e., lane estimation, change, and centering; road markings; intersections; LMTs; crosswalks and adjacent lanes). ELAS achieved high detection rates in all real-world events and proved to be ready for real-time applications.
* 13 pages, 17 figures, github.com/rodrigoberriel/ego-lane-analysis-system, and published by Image and Vision Computing (IMAVIS)