 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpert Evaluation and the Limits of Human Feedback in Mental Health AI Safety Testing
Jan 26, 2026Learning from human feedback~(LHF) assumes that expert judgments, appropriately aggregated, yield valid ground truth for training and evaluating AI systems. We tested this assumption in mental health, where high safety stakes make expert consensus essential. Three certified psychiatrists independently evaluated LLM-generated responses using a calibrated rubric. Despite similar training and shared instructions, inter-rater reliability was consistently poor ($ICC$ $0.087$--$0.295$), falling below thresholds considered acceptable for consequential assessment. Disagreement was highest on the most safety-critical items. Suicide and self-harm responses produced greater divergence than any other category, and was systematic rather than random. One factor yielded negative reliability (Krippendorff's $α= -0.203$), indicating structured disagreement worse than chance. Qualitative interviews revealed that disagreement reflects coherent but incompatible individual clinical frameworks, safety-first, engagement-centered, and culturally-informed orientations, rather than measurement error. By demonstrating that experts rely on holistic risk heuristics rather than granular factor discrimination, these findings suggest that aggregated labels function as arithmetic compromises that effectively erase grounded professional philosophies. Our results characterize expert disagreement in safety-critical AI as a sociotechnical phenomenon where professional experience introduces sophisticated layers of principled divergence. We discuss implications for reward modeling, safety classification, and evaluation benchmarks, recommending that practitioners shift from consensus-based aggregation to alignment methods that preserve and learn from expert disagreement.
Markov Decision Processes for Satellite Maneuver Planning and Collision Avoidance
Jan 05, 2025



This paper presents a decentralized, online planning approach for scalable maneuver planning for large constellations. While decentralized, rule-based strategies have facilitated efficient scaling, optimal decision-making algorithms for satellite maneuvers remain underexplored. As commercial satellite constellations grow, there are benefits of online maneuver planning, such as using real-time trajectory predictions to improve state knowledge, thereby reducing maneuver frequency and conserving fuel. We address this gap in the research by treating the satellite maneuver planning problem as a Markov decision process (MDP). This approach enables the generation of optimal maneuver policies online with low computational cost. This formulation is applied to the low Earth orbit collision avoidance problem, considering the problem of an active spacecraft deciding to maneuver to avoid a non-maneuverable object. We test the policies we generate in a simulated low Earth orbit environment, and compare the results to traditional rule-based collision avoidance techniques.
Beyond Gradient Averaging in Parallel Optimization: Improved Robustness through Gradient Agreement Filtering
Dec 24, 2024



We introduce Gradient Agreement Filtering (GAF) to improve on gradient averaging in distributed deep learning optimization. Traditional distributed data-parallel stochastic gradient descent involves averaging gradients of microbatches to calculate a macrobatch gradient that is then used to update model parameters. We find that gradients across microbatches are often orthogonal or negatively correlated, especially in late stages of training, which leads to memorization of the training set, reducing generalization. In this paper, we introduce a simple, computationally effective way to reduce gradient variance by computing the cosine distance between micro-gradients during training and filtering out conflicting updates prior to averaging. We improve validation accuracy with significantly smaller microbatch sizes. We also show this reduces memorizing noisy labels. We demonstrate the effectiveness of this technique on standard image classification benchmarks including CIFAR-100 and CIFAR-100N-Fine. We show this technique consistently outperforms validation accuracy, in some cases by up to 18.2\% compared to traditional training approaches while reducing the computation required nearly an order of magnitude because we can now rely on smaller microbatch sizes without destabilizing training.
A Maximum Independent Set Method for Scheduling Earth Observing Satellite Constellations
Aug 15, 2020

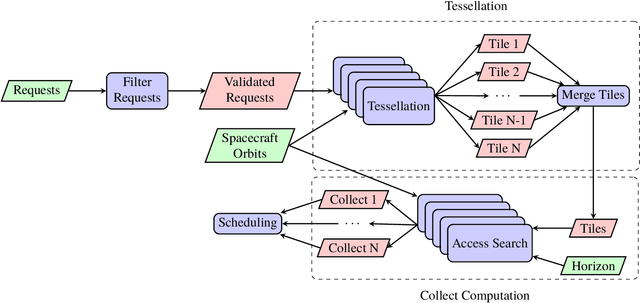

Operating Earth observing satellites requires efficient planning methods that coordinate activities of multiple spacecraft. The satellite task planning problem entails selecting actions that best satisfy mission objectives for autonomous execution. Task scheduling is often performed by human operators assisted by heuristic or rule-based planning tools. This approach does not efficiently scale to multiple assets as heuristics frequently fail to properly coordinate actions of multiple vehicles over long horizons. Additionally, the problem becomes more difficult to solve for large constellations as the complexity of the problem scales exponentially in the number of requested observations and linearly in the number of spacecraft. It is expected that new commercial optical and radar imaging constellations will require automated planning methods to meet stated responsiveness and throughput objectives. This paper introduces a new approach for solving the satellite scheduling problem by generating an infeasibility-based graph representation of the problem and finding a maximal independent set of vertices for the graph. The approach is tested on a scenarios of up to 10,000 requested imaging locations for the Skysat constellation of optical satellites as well as simulated constellations of up to 24 satellites. Performance is compared with contemporary graph-traversal and mixed-integer linear programming approaches. Empirical results demonstrate improvements in both the solution time along with the number of scheduled collections beyond baseline methods. For large problems, the maximum independent set approach is able find a feasible schedule with 8% more collections in 75% less time.