Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti Agent Pathfinding for Noise Restricted Hybrid Fuel Unmanned Aerial Vehicles
Mar 26, 2024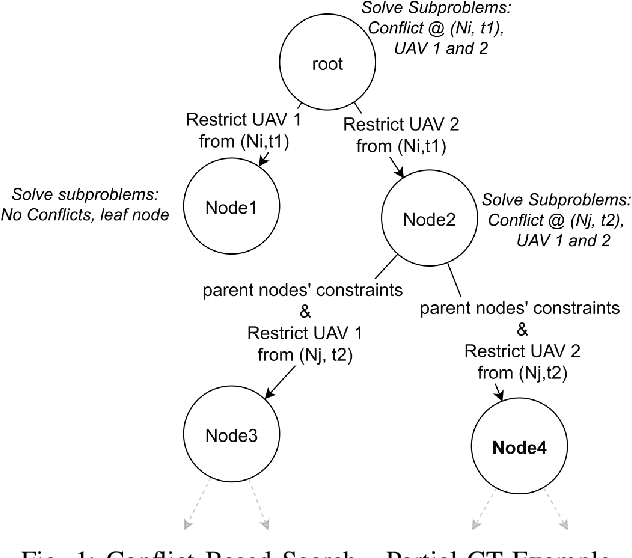
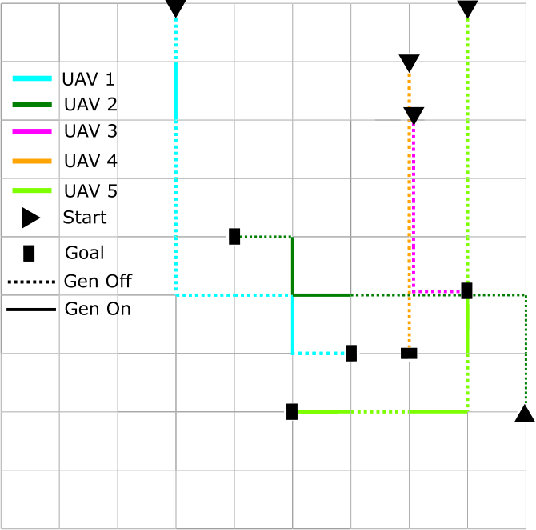
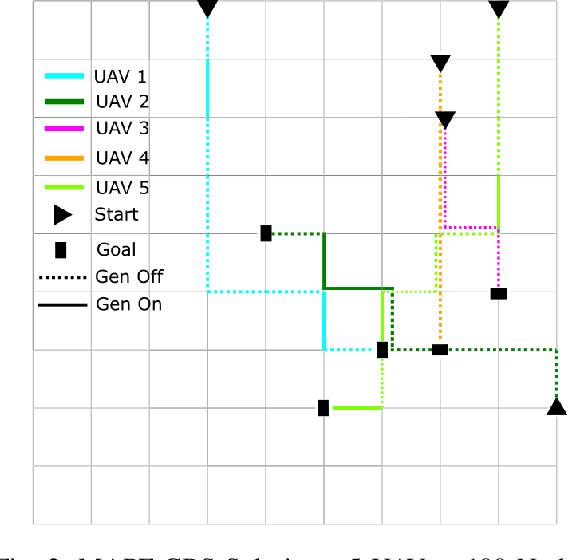
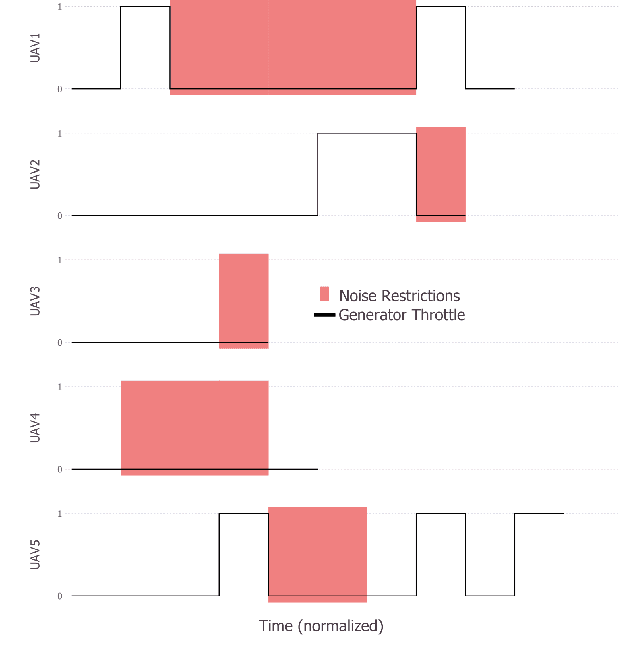
Multi Agent Path Finding (MAPF) seeks the optimal set of paths for multiple agents from respective start to goal locations such that no paths conflict. We address the MAPF problem for a fleet of hybrid-fuel unmanned aerial vehicles which are subject to location-dependent noise restrictions. We solve this problem by searching a constraint tree for which the subproblem at each node is a set of shortest path problems subject to the noise and fuel constraints and conflict zone avoidance. A labeling algorithm is presented to solve this subproblem, including the conflict zones which are treated as dynamic obstacles. We present the experimental results of the algorithms for various graph sizes and number of agents.
* 6 pages, 7 figures
Via