 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTherA: Thermal-Aware Visual-Language Prompting for Controllable RGB-to-Thermal Infrared Translation
Feb 24, 2026Despite the inherent advantages of thermal infrared(TIR) imaging, large-scale data collection and annotation remain a major bottleneck for TIR-based perception. A practical alternative is to synthesize pseudo TIR data via image translation; however, most RGB-to-TIR approaches heavily rely on RGB-centric priors that overlook thermal physics, yielding implausible heat distributions. In this paper, we introduce TherA, a controllable RGB-to-TIR translation framework that produces diverse and thermally plausible images at both scene and object level. TherA couples TherA-VLM with a latent-diffusion-based translator. Given a single RGB image and a user-prompted condition pair, TherA-VLM yields a thermal-aware embedding that encodes scene, object, material, and heat-emission context reflecting the input scene-condition pair. Conditioning the diffusion model on this embedding enables realistic TIR synthesis and fine-grained control across time of day, weather, and object state. Compared to other baselines, TherA achieves state-of-the-art translation performance, demonstrating improved zero-shot translation performance up to 33% increase averaged across all metrics.
TranSplat: Surface Embedding-guided 3D Gaussian Splatting for Transparent Object Manipulation
Feb 11, 2025



Transparent object manipulation remains a sig- nificant challenge in robotics due to the difficulty of acquiring accurate and dense depth measurements. Conventional depth sensors often fail with transparent objects, resulting in in- complete or erroneous depth data. Existing depth completion methods struggle with interframe consistency and incorrectly model transparent objects as Lambertian surfaces, leading to poor depth reconstruction. To address these challenges, we propose TranSplat, a surface embedding-guided 3D Gaussian Splatting method tailored for transparent objects. TranSplat uses a latent diffusion model to generate surface embeddings that provide consistent and continuous representations, making it robust to changes in viewpoint and lighting. By integrating these surface embeddings with input RGB images, TranSplat effectively captures the complexities of transparent surfaces, enhancing the splatting of 3D Gaussians and improving depth completion. Evaluations on synthetic and real-world transpar- ent object benchmarks, as well as robot grasping tasks, show that TranSplat achieves accurate and dense depth completion, demonstrating its effectiveness in practical applications. We open-source synthetic dataset and model: https://github. com/jeongyun0609/TranSplat
Thermal Chameleon: Task-Adaptive Tone-mapping for Radiometric Thermal-Infrared images
Oct 24, 2024



Thermal Infrared (TIR) imaging provides robust perception for navigating in challenging outdoor environments but faces issues with poor texture and low image contrast due to its 14/16-bit format. Conventional methods utilize various tone-mapping methods to enhance contrast and photometric consistency of TIR images, however, the choice of tone-mapping is largely dependent on knowing the task and temperature dependent priors to work well. In this paper, we present Thermal Chameleon Network (TCNet), a task-adaptive tone-mapping approach for RAW 14-bit TIR images. Given the same image, TCNet tone-maps different representations of TIR images tailored for each specific task, eliminating the heuristic image rescaling preprocessing and reliance on the extensive prior knowledge of the scene temperature or task-specific characteristics. TCNet exhibits improved generalization performance across object detection and monocular depth estimation, with minimal computational overhead and modular integration to existing architectures for various tasks. Project Page: https://github.com/donkeymouse/ThermalChameleon
Edge-guided Multi-domain RGB-to-TIR image Translation for Training Vision Tasks with Challenging Labels
Jan 30, 2023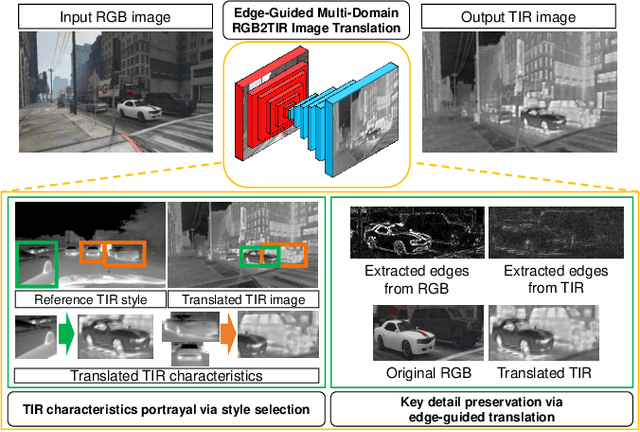
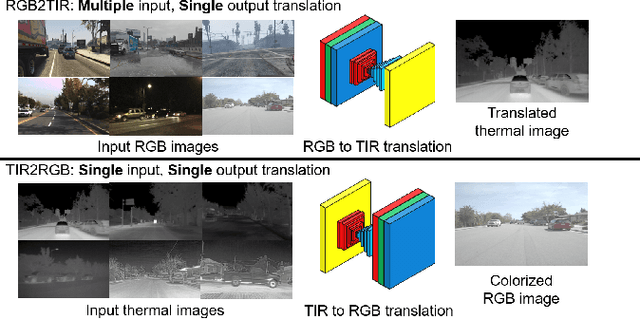

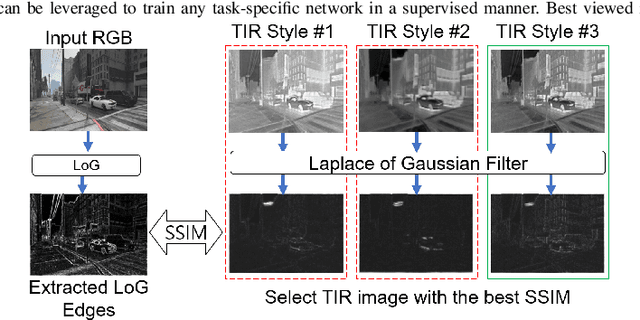
The insufficient number of annotated thermal infrared (TIR) image datasets not only hinders TIR image-based deep learning networks to have comparable performances to that of RGB but it also limits the supervised learning of TIR image-based tasks with challenging labels. As a remedy, we propose a modified multidomain RGB to TIR image translation model focused on edge preservation to employ annotated RGB images with challenging labels. Our proposed method not only preserves key details in the original image but also leverages the optimal TIR style code to portray accurate TIR characteristics in the translated image, when applied on both synthetic and real world RGB images. Using our translation model, we have enabled the supervised learning of deep TIR image-based optical flow estimation and object detection that ameliorated in deep TIR optical flow estimation by reduction in end point error by 56.5\% on average and the best object detection mAP of 23.9\% respectively. Our code and supplementary materials are available at https://github.com/rpmsnu/sRGB-TIR.