 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Clutter Detection and Semantic Segmentation of Moving Objects for Automotive Radar Data
Nov 14, 2023



The unique properties of radar sensors, such as their robustness to adverse weather conditions, make them an important part of the environment perception system of autonomous vehicles. One of the first steps during the processing of radar point clouds is often the detection of clutter, i.e. erroneous points that do not correspond to real objects. Another common objective is the semantic segmentation of moving road users. These two problems are handled strictly separate from each other in literature. The employed neural networks are always focused entirely on only one of the tasks. In contrast to this, we examine ways to solve both tasks at the same time with a single jointly used model. In addition to a new augmented multi-head architecture, we also devise a method to represent a network's predictions for the two tasks with only one output value. This novel approach allows us to solve the tasks simultaneously with the same inference time as a conventional task-specific model. In an extensive evaluation, we show that our setup is highly effective and outperforms every existing network for semantic segmentation on the RadarScenes dataset.
Tackling Clutter in Radar Data -- Label Generation and Detection Using PointNet++
Mar 16, 2023Radar sensors employed for environment perception, e.g. in autonomous vehicles, output a lot of unwanted clutter. These points, for which no corresponding real objects exist, are a major source of errors in following processing steps like object detection or tracking. We therefore present two novel neural network setups for identifying clutter. The input data, network architectures and training configuration are adjusted specifically for this task. Special attention is paid to the downsampling of point clouds composed of multiple sensor scans. In an extensive evaluation, the new setups display substantially better performance than existing approaches. Because there is no suitable public data set in which clutter is annotated, we design a method to automatically generate the respective labels. By applying it to existing data with object annotations and releasing its code, we effectively create the first freely available radar clutter data set representing real-world driving scenarios. Code and instructions are accessible at www.github.com/kopp-j/clutter-ds.
Fast Rule-Based Clutter Detection in Automotive Radar Data
Aug 27, 2021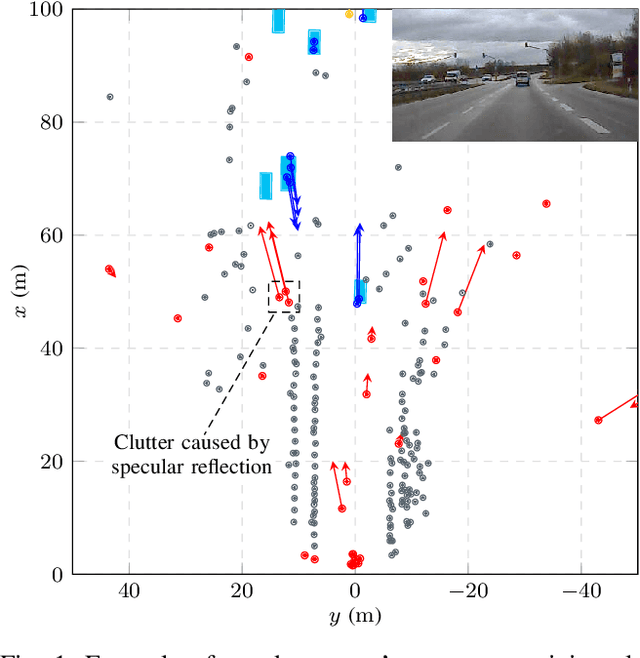
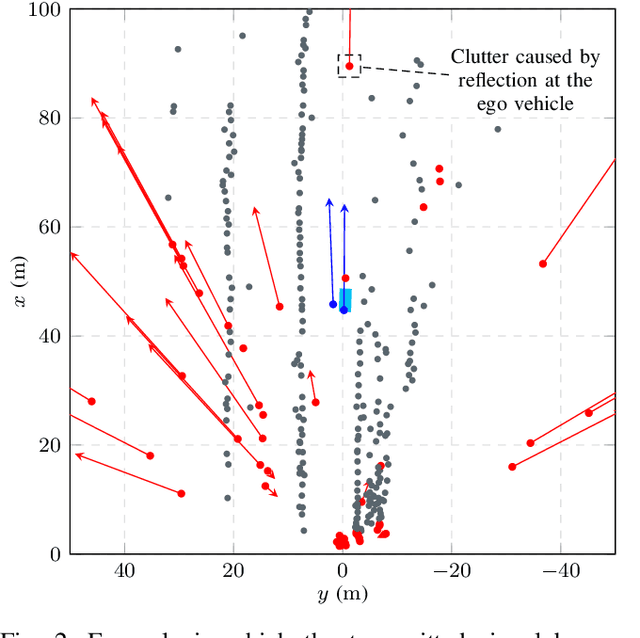
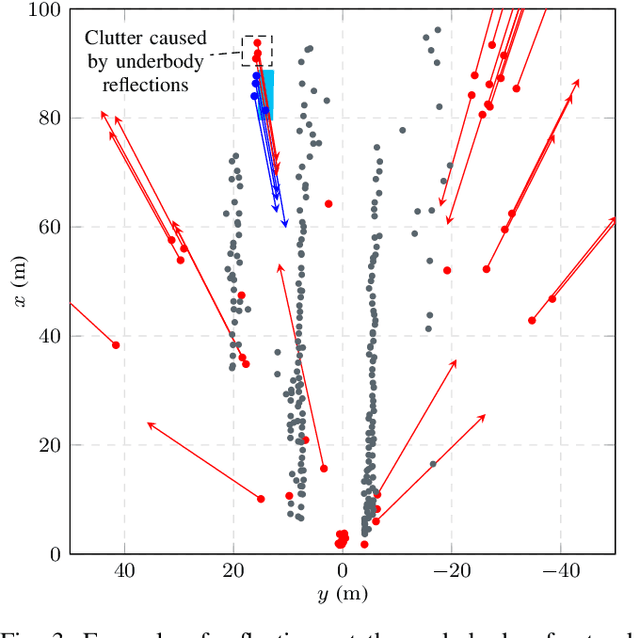
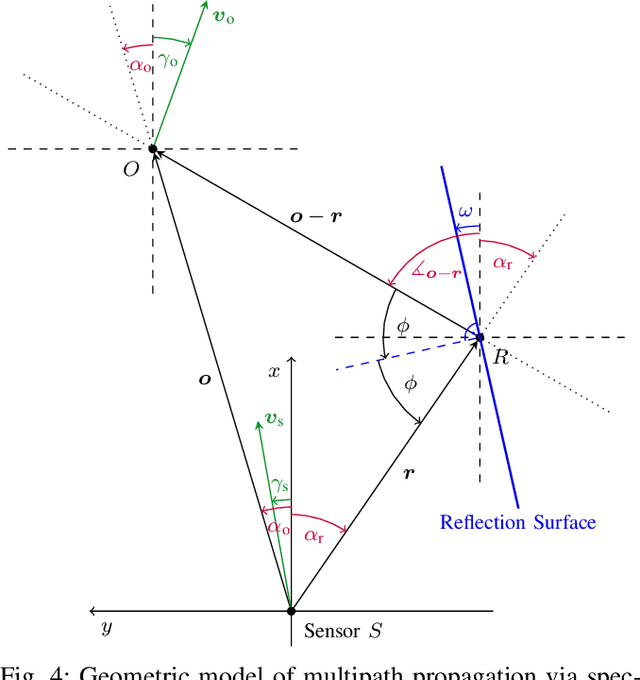
Automotive radar sensors output a lot of unwanted clutter or ghost detections, whose position and velocity do not correspond to any real object in the sensor's field of view. This poses a substantial challenge for environment perception methods like object detection or tracking. Especially problematic are clutter detections that occur in groups or at similar locations in multiple consecutive measurements. In this paper, a new algorithm for identifying such erroneous detections is presented. It is mainly based on the modeling of specific commonly occurring wave propagation paths that lead to clutter. In particular, the three effects explicitly covered are reflections at the underbody of a car or truck, signals traveling back and forth between the vehicle on which the sensor is mounted and another object, and multipath propagation via specular reflection. The latter often occurs near guardrails, concrete walls or similar reflective surfaces. Each of these effects is described both theoretically and regarding a method for identifying the corresponding clutter detections. Identification is done by analyzing detections generated from a single sensor measurement only. The final algorithm is evaluated on recordings of real extra-urban traffic. For labeling, a semi-automatic process is employed. The results are promising, both in terms of performance and regarding the very low execution time. Typically, a large part of clutter is found, while only a small ratio of detections corresponding to real objects are falsely classified by the algorithm.