 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven Feedback Control of Lattice Structures with Localized Actuation and Sensing
Oct 11, 2024Assembling lattices from discrete building blocks enables the composition of large, heterogeneous, and easily reconfigurable objects with desirable mass-to-stiffness ratios. This type of building system may also be referred to as a digital material, as it is constituted from discrete, error-correcting components. Researchers have demonstrated various active structures and even robotic systems that take advantage of the reconfigurable, mass-efficient properties of discrete lattice structures. However, the existing literature has predominantly used open-loop control strategies, limiting the performance of the presented systems. In this paper, we present a novel approach to feedback control of digital lattice structures, leveraging real-time measurements of the system dynamics. We introduce an actuated voxel which constitutes a novel means for actuation of lattice structures. Our control method is based on the Extended Dynamical Mode Decomposition algorithm in conjunction with the Linear Quadratic Regulator and the Koopman Model Predictive Control. The key advantage of our approach lies in its purely data-driven nature, without the need for any prior knowledge of a system's structure. We illustrate the developed method via real experiments with custom-built flexible lattice beam, showing its ability to accomplish various tasks even with minimal sensing and actuation resources. In particular, we address two problems: stabilization together with disturbance attenuation, and reference tracking.
Optimal Control Policies to Address the Pandemic Health-Economy Dilemma
Feb 24, 2021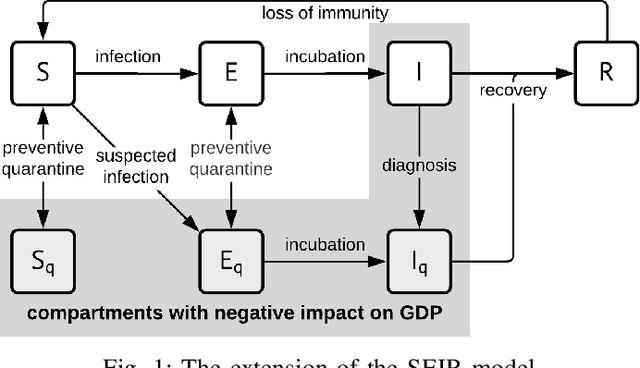
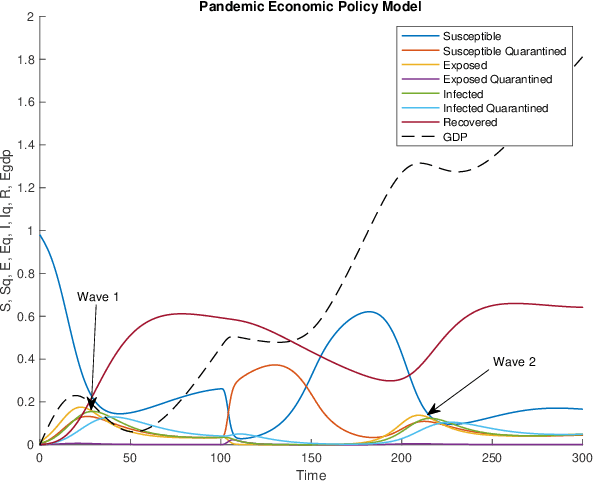
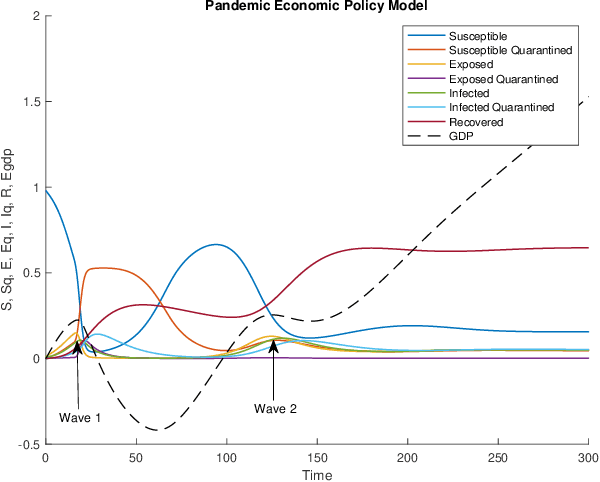
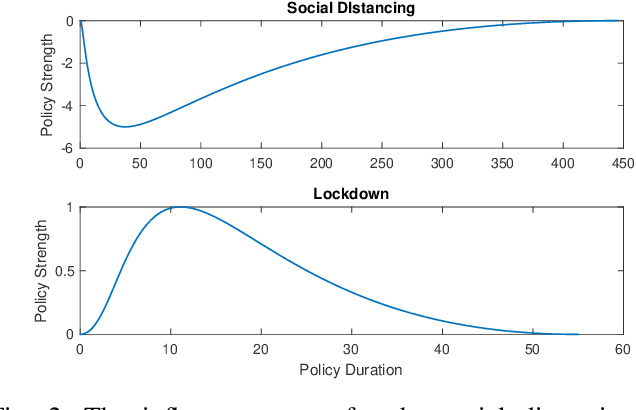
Non-pharmaceutical interventions (NPIs) are effective measures to contain a pandemic. Yet, such control measures commonly have a negative effect on the economy. Here, we propose a macro-level approach to support resolving this Health-Economy Dilemma (HED). First, an extension to the well-known SEIR model is suggested which includes an economy model. Second, a bi-objective optimization problem is defined to study optimal control policies in view of the HED problem. Next, several multi-objective evolutionary algorithms are applied to perform a study on the health-economy performance trade-offs that are inherent to the obtained optimal policies. Finally, the results from the applied algorithms are compared to select a preferred algorithm for future studies. As expected, for the proposed models and strategies, a clear conflict between the health and economy performances is found. Furthermore, the results suggest that the guided usage of NPIs is preferable as compared to refraining from employing such strategies at all. This study contributes to pandemic modeling and simulation by providing a novel concept that elaborates on integrating economic aspects while exploring the optimal moment to enable NPIs.
How swarm size during evolution impacts the behavior, generalizability, and brain complexity of animats performing a spatial navigation task
Apr 24, 2018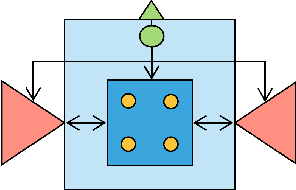
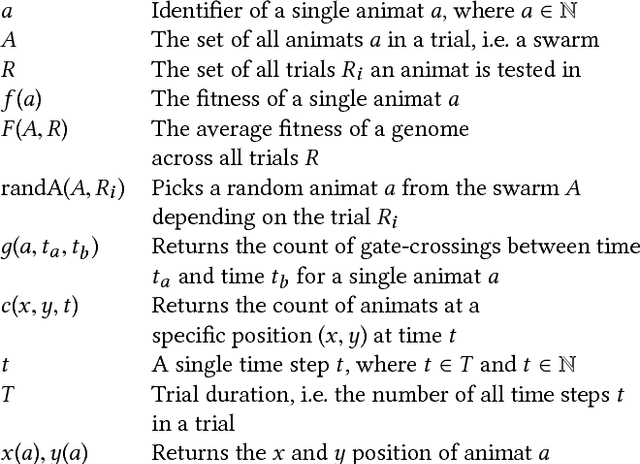
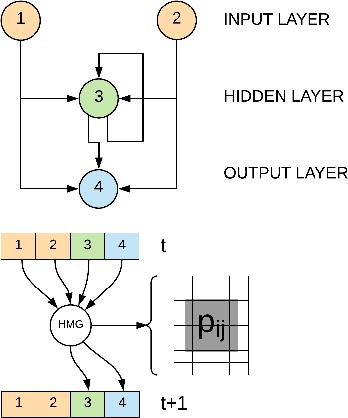
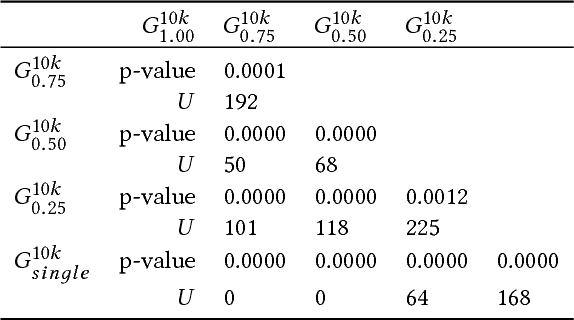
While it is relatively easy to imitate and evolve natural swarm behavior in simulations, less is known about the social characteristics of simulated, evolved swarms, such as the optimal (evolutionary) group size, why individuals in a swarm perform certain actions, and how behavior would change in swarms of different sizes. To address these questions, we used a genetic algorithm to evolve animats equipped with Markov Brains in a spatial navigation task that facilitates swarm behavior. The animats' goal was to frequently cross between two rooms without colliding with other animats. Animats were evolved in swarms of various sizes. We then evaluated the task performance and social behavior of the final generation from each evolution when placed with swarms of different sizes in order to evaluate their generalizability across conditions. According to our experiments, we find that swarm size during evolution matters: animats evolved in a balanced swarm developed more flexible behavior, higher fitness across conditions, and, in addition, higher brain complexity.