 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Tracking on the Move: Learning to Track the World from a Moving Vehicle using Recurrent Neural Networks
Apr 19, 2017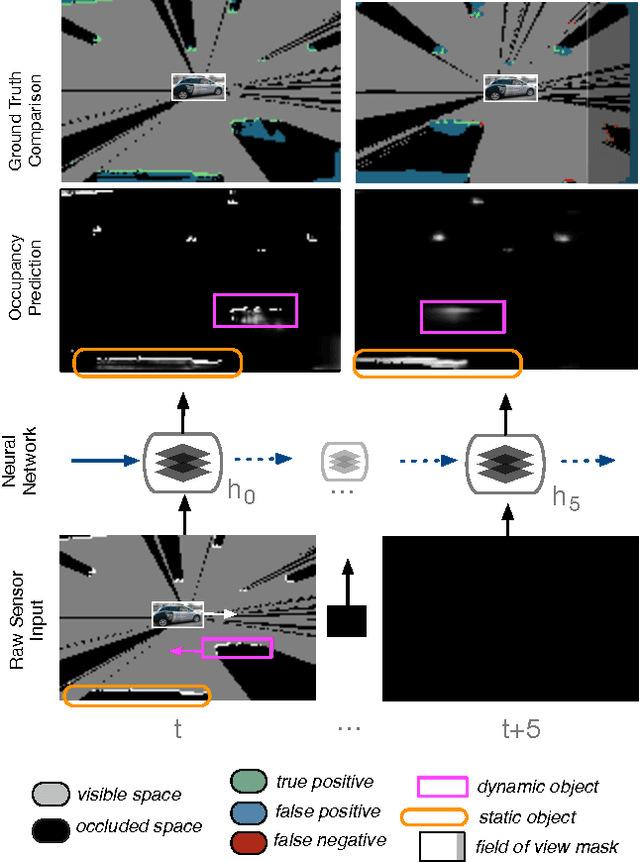

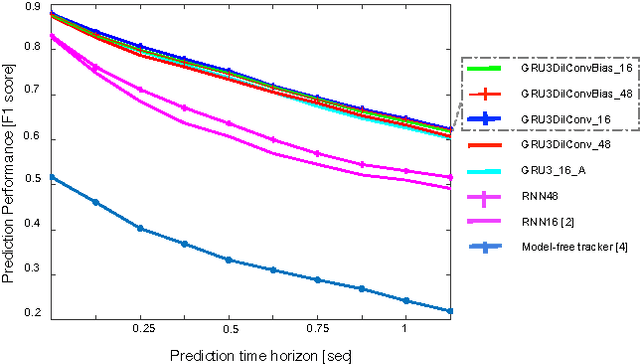
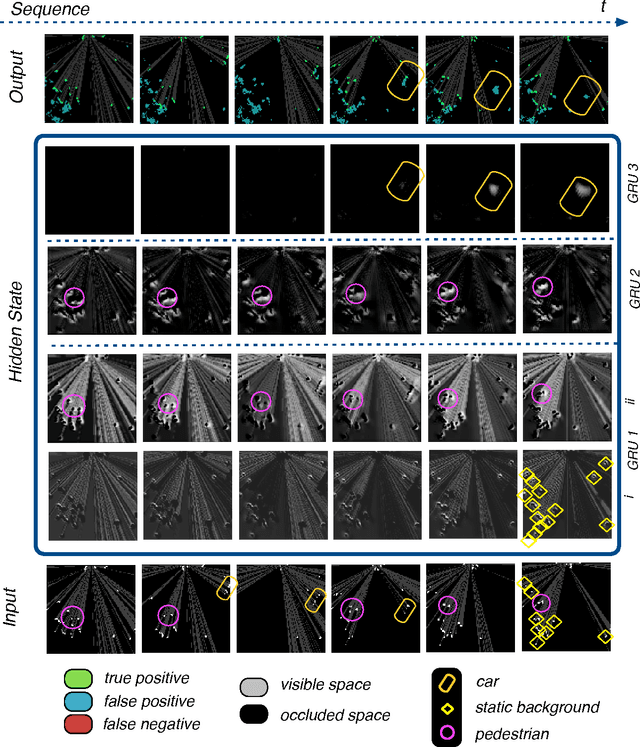
This paper presents an end-to-end approach for tracking static and dynamic objects for an autonomous vehicle driving through crowded urban environments. Unlike traditional approaches to tracking, this method is learned end-to-end, and is able to directly predict a full unoccluded occupancy grid map from raw laser input data. Inspired by the recently presented DeepTracking approach [Ondruska, 2016], we employ a recurrent neural network (RNN) to capture the temporal evolution of the state of the environment, and propose to use Spatial Transformer modules to exploit estimates of the egomotion of the vehicle. Our results demonstrate the ability to track a range of objects, including cars, buses, pedestrians, and cyclists through occlusion, from both moving and stationary platforms, using a single learned model. Experimental results demonstrate that the model can also predict the future states of objects from current inputs, with greater accuracy than previous work.