 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a user-friendly control system for planetary rovers with CPS feature
Jun 28, 2021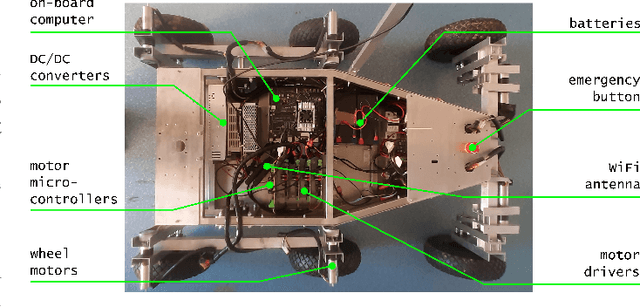

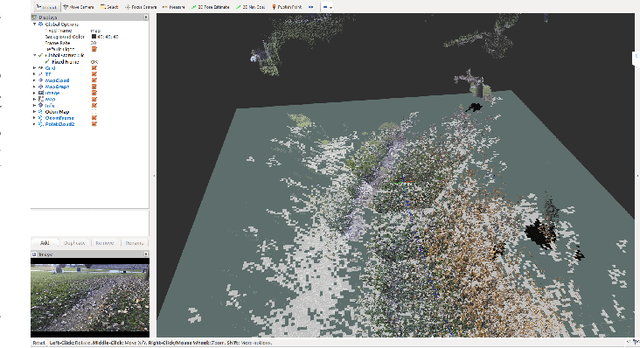
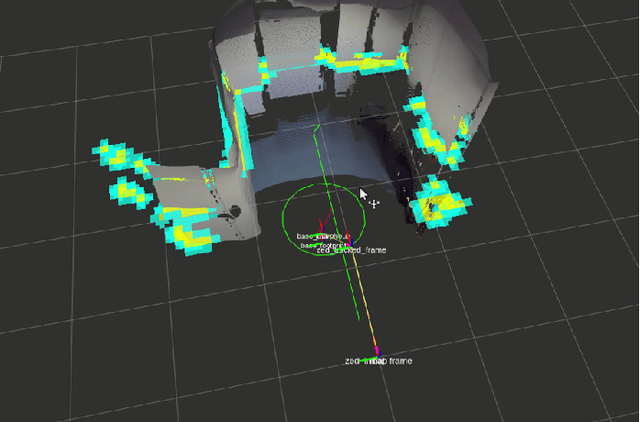
In this paper, we present a user-friendly planetary rover's control system for low latency surface telerobotic. Thanks to the proposed system, an operator can comfortably give commands through the control base station to a rover using commercially available off-the-shelf (COTS) joysticks or by command sequencing with interactive monitoring on the sensed map of the environment. During operations, high situational awareness is made possible thanks to 3D map visualization. The map of the environment is built on the on-board computer by processing the rover's camera images with a visual Simultaneous Localization and Mapping (SLAM) algorithm. It is transmitted via Wi-Fi and displayed on the control base station screen in near real-time. The navigation stack takes as input the visual SLAM data to build a cost map to find the minimum cost path. By interacting with the virtual map, the rover exhibits properties of a Cyber Physical System (CPS) for its self-awareness capabilities. The software architecture is based on the Robot Operative System (ROS) middleware. The system design and the preliminary field test results are shown in the paper.