 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMath Programming based Reinforcement Learning for Multi-Echelon Inventory Management
Dec 04, 2021
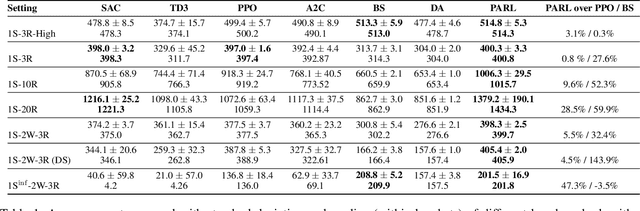
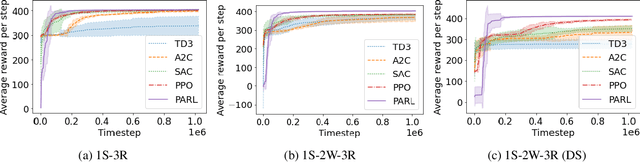

Reinforcement learning has lead to considerable break-throughs in diverse areas such as robotics, games and many others. But the application to RL in complex real-world decision making problems remains limited. Many problems in operations management (inventory and revenue management, for example) are characterized by large action spaces and stochastic system dynamics. These characteristics make the problem considerably harder to solve for existing RL methods that rely on enumeration techniques to solve per step action problems. To resolve these issues, we develop Programmable Actor Reinforcement Learning (PARL), a policy iteration method that uses techniques from integer programming and sample average approximation. Analytically, we show that the for a given critic, the learned policy in each iteration converges to the optimal policy as the underlying samples of the uncertainty go to infinity. Practically, we show that a properly selected discretization of the underlying uncertain distribution can yield near optimal actor policy even with very few samples from the underlying uncertainty. We then apply our algorithm to real-world inventory management problems with complex supply chain structures and show that PARL outperforms state-of-the-art RL and inventory optimization methods in these settings. We find that PARL outperforms commonly used base stock heuristic by 44.7% and the best performing RL method by up to 12.1% on average across different supply chain environments.