 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Similarity Search in Automotive Production
May 12, 2025Visual quality inspection in automotive production is essential for ensuring the safety and reliability of vehicles. Computer vision (CV) has become a popular solution for these inspections due to its cost-effectiveness and reliability. However, CV models require large, annotated datasets, which are costly and time-consuming to collect. To reduce the need for extensive training data, we propose a novel image classification pipeline that combines similarity search using a vision-based foundation model with synthetic data. Our approach leverages a DINOv2 model to transform input images into feature vectors, which are then compared to pre-classified reference images using cosine distance measurements. By utilizing synthetic data instead of real images as references, our pipeline achieves high classification accuracy without relying on real data. We evaluate this approach in eight real-world inspection scenarios and demonstrate that it meets the high performance requirements of production environments.
Fully-Synthetic Training for Visual Quality Inspection in Automotive Production
Mar 12, 2025


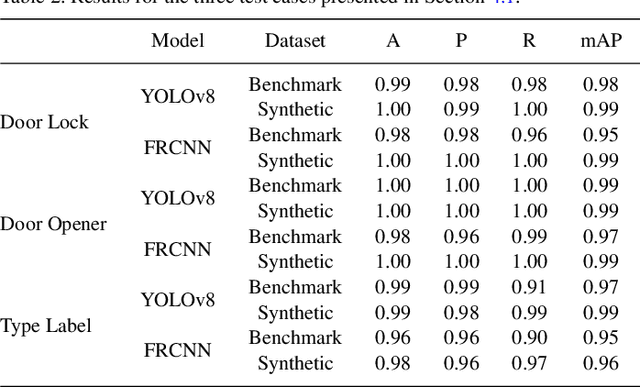
Visual Quality Inspection plays a crucial role in modern manufacturing environments as it ensures customer safety and satisfaction. The introduction of Computer Vision (CV) has revolutionized visual quality inspection by improving the accuracy and efficiency of defect detection. However, traditional CV models heavily rely on extensive datasets for training, which can be costly, time-consuming, and error-prone. To overcome these challenges, synthetic images have emerged as a promising alternative. They offer a cost-effective solution with automatically generated labels. In this paper, we propose a pipeline for generating synthetic images using domain randomization. We evaluate our approach in three real inspection scenarios and demonstrate that an object detection model trained solely on synthetic data can outperform models trained on real images.
Industrial Application of 6D Pose Estimation for Robotic Manipulation in Automotive Internal Logistics
Sep 25, 2023



Despite the advances in robotics a large proportion of the of parts handling tasks in the automotive industry's internal logistics are not automated but still performed by humans. A key component to competitively automate these processes is a 6D pose estimation that can handle a large number of different parts, is adaptable to new parts with little manual effort, and is sufficiently accurate and robust with respect to industry requirements. In this context, the question arises as to the current status quo with respect to these measures. To address this we built a representative 6D pose estimation pipeline with state-of-the-art components from economically scalable real to synthetic data generation to pose estimators and evaluated it on automotive parts with regards to a realistic sequencing process. We found that using the data generation approaches, the performance of the trained 6D pose estimators are promising, but do not meet industry requirements. We reveal that the reason for this is the inability of the estimators to provide reliable uncertainties for their poses, rather than the ability of to provide sufficiently accurate poses. In this context we further analyzed how RGB- and RGB-D-based approaches compare against this background and show that they are differently vulnerable to the domain gap induced by synthetic data.