 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEchoReview: Learning Peer Review from the Echoes of Scientific Citations
Jan 31, 2026As the volume of scientific submissions continues to grow rapidly, traditional peer review systems are facing unprecedented scalability pressures, highlighting the urgent need for automated reviewing methods that are both scalable and reliable. Existing supervised fine-tuning approaches based on real review data are fundamentally constrained by single-source of data as well as the inherent subjectivity and inconsistency of human reviews, limiting their ability to support high-quality automated reviewers. To address these issues, we propose EchoReview, a citation-context-driven data synthesis framework that systematically mines implicit collective evaluative signals from academic citations and transforms scientific community's long-term judgments into structured review-style data. Based on this pipeline, we construct EchoReview-16K, the first large-scale, cross-conference, and cross-year citation-driven review dataset, and train an automated reviewer, EchoReviewer-7B. Experimental results demonstrate that EchoReviewer-7B can achieve significant and stable improvements on core review dimensions such as evidence support and review comprehensiveness, validating citation context as a robust and effective data paradigm for reliable automated peer review.
Physics-Guided Tiny-Mamba Transformer for Reliability-Aware Early Fault Warning
Jan 29, 2026Reliability-centered prognostics for rotating machinery requires early warning signals that remain accurate under nonstationary operating conditions, domain shifts across speed/load/sensors, and severe class imbalance, while keeping the false-alarm rate small and predictable. We propose the Physics-Guided Tiny-Mamba Transformer (PG-TMT), a compact tri-branch encoder tailored for online condition monitoring. A depthwise-separable convolutional stem captures micro-transients, a Tiny-Mamba state-space branch models near-linear long-range dynamics, and a lightweight local Transformer encodes cross-channel resonances. We derive an analytic temporal-to-spectral mapping that ties the model's attention spectrum to classical bearing fault-order bands, yielding a band-alignment score that quantifies physical plausibility and provides physics-grounded explanations. To ensure decision reliability, healthy-score exceedances are modeled with extreme-value theory (EVT), which yields an on-threshold achieving a target false-alarm intensity (events/hour); a dual-threshold hysteresis with a minimum hold time further suppresses chatter. Under a leakage-free streaming protocol with right-censoring of missed detections on CWRU, Paderborn, XJTU-SY, and an industrial pilot, PG-TMT attains higher precision-recall AUC (primary under imbalance), competitive or better ROC AUC, and shorter mean time-to-detect at matched false-alarm intensity, together with strong cross-domain transfer. By coupling physics-aligned representations with EVT-calibrated decision rules, PG-TMT delivers calibrated, interpretable, and deployment-ready early warnings for reliability-centric prognostics and health management.
Relevance-driven Decision Making for Safer and More Efficient Human Robot Collaboration
Sep 21, 2024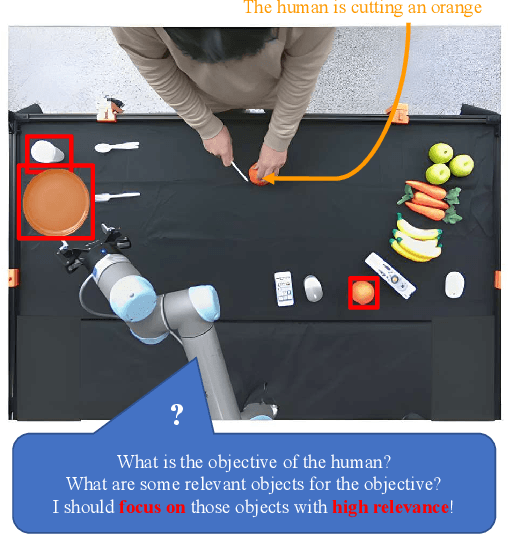
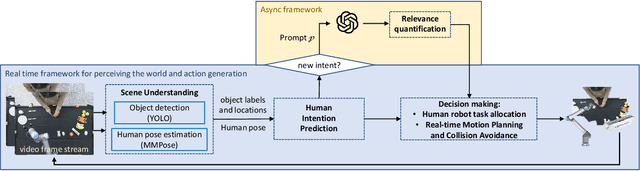
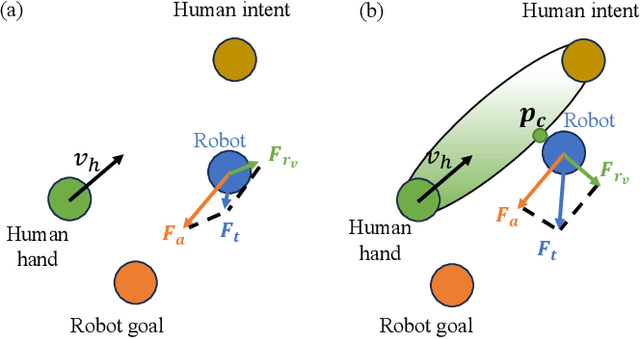
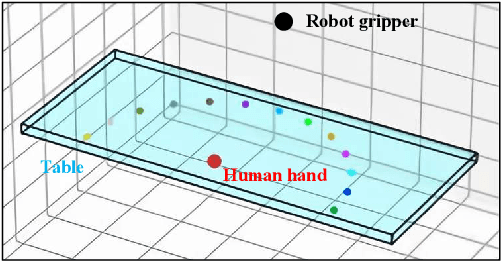
Human intelligence possesses the ability to effectively focus on important environmental components, which enhances perception, learning, reasoning, and decision-making. Inspired by this cognitive mechanism, we introduced a novel concept termed relevance for Human-Robot Collaboration (HRC). Relevance is defined as the importance of the objects based on the applicability and pertinence of the objects for the human objective or other factors. In this paper, we further developed a novel two-loop framework integrating real-time and asynchronous processing to quantify relevance and apply relevance for safer and more efficient HRC. The asynchronous loop leverages the world knowledge from an LLM and quantifies relevance, and the real-time loop executes scene understanding, human intent prediction, and decision-making based on relevance. In decision making, we proposed and developed a human robot task allocation method based on relevance and a novel motion generation and collision avoidance methodology considering the prediction of human trajectory. Simulations and experiments show that our methodology for relevance quantification can accurately and robustly predict the human objective and relevance, with an average accuracy of up to 0.90 for objective prediction and up to 0.96 for relevance prediction. Moreover, our motion generation methodology reduces collision cases by 63.76% and collision frames by 44.74% when compared with a state-of-the-art (SOTA) collision avoidance method. Our framework and methodologies, with relevance, guide the robot on how to best assist humans and generate safer and more efficient actions for HRC.
Relevance for Human Robot Collaboration
Sep 12, 2024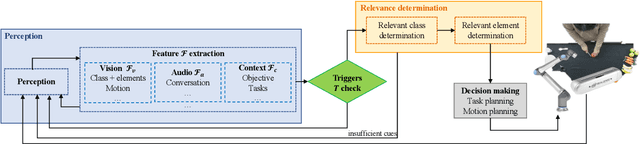
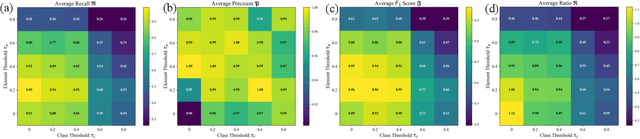
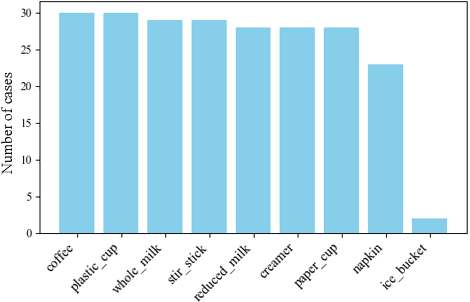
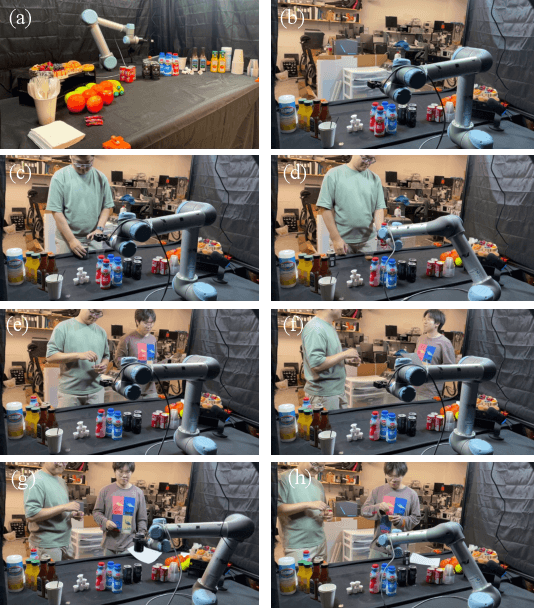
Effective human-robot collaboration (HRC) requires the robots to possess human-like intelligence. Inspired by the human's cognitive ability to selectively process and filter elements in complex environments, this paper introduces a novel concept and scene-understanding approach termed `relevance.' It identifies relevant components in a scene. To accurately and efficiently quantify relevance, we developed an event-based framework that selectively triggers relevance determination, along with a probabilistic methodology built on a structured scene representation. Simulation results demonstrate that the relevance framework and methodology accurately predict the relevance of a general HRC setup, achieving a precision of 0.99 and a recall of 0.94. Relevance can be broadly applied to several areas in HRC to improve task planning time by 79.56% compared with pure planning for a cereal task, reduce perception latency by up to 26.53% for an object detector, improve HRC safety by up to 13.50% and reduce the number of inquiries for HRC by 75.36%. A real-world demonstration showcases the relevance framework's ability to intelligently assist humans in everyday tasks.