 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelevance for Human Robot Collaboration
Paper and Code
Sep 12, 2024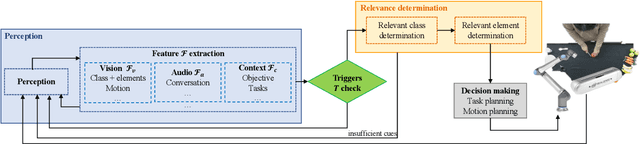
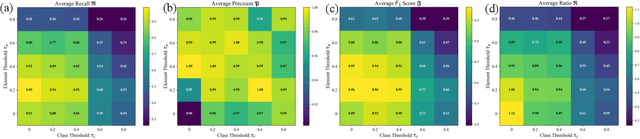
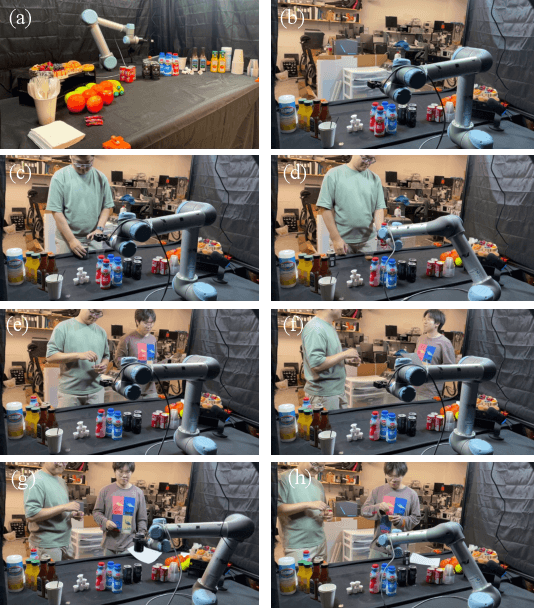
Effective human-robot collaboration (HRC) requires the robots to possess human-like intelligence. Inspired by the human's cognitive ability to selectively process and filter elements in complex environments, this paper introduces a novel concept and scene-understanding approach termed `relevance.' It identifies relevant components in a scene. To accurately and efficiently quantify relevance, we developed an event-based framework that selectively triggers relevance determination, along with a probabilistic methodology built on a structured scene representation. Simulation results demonstrate that the relevance framework and methodology accurately predict the relevance of a general HRC setup, achieving a precision of 0.99 and a recall of 0.94. Relevance can be broadly applied to several areas in HRC to improve task planning time by 79.56% compared with pure planning for a cereal task, reduce perception latency by up to 26.53% for an object detector, improve HRC safety by up to 13.50% and reduce the number of inquiries for HRC by 75.36%. A real-world demonstration showcases the relevance framework's ability to intelligently assist humans in everyday tasks.