 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMEAL: Manifold Embedding-based Active Learning
Jul 20, 2021

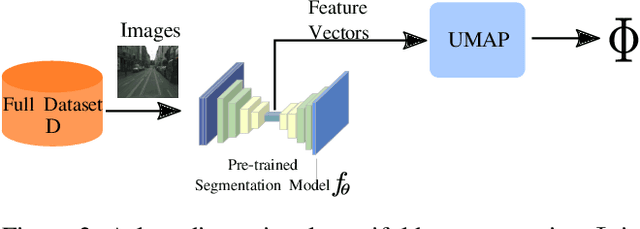
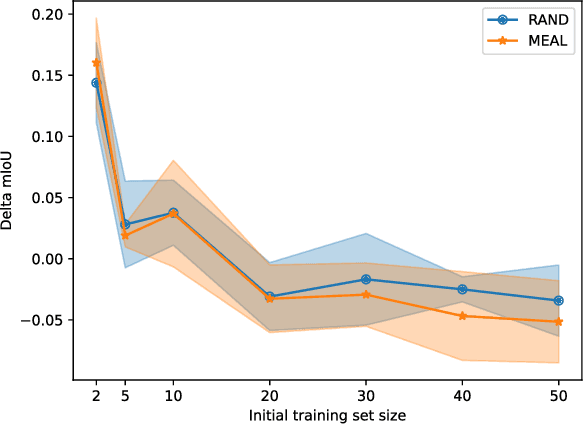
Image segmentation is a common and challenging task in autonomous driving. Availability of sufficient pixel-level annotations for the training data is a hurdle. Active learning helps learning from small amounts of data by suggesting the most promising samples for labeling. In this work, we propose a new pool-based method for active learning, which proposes promising patches extracted from full image, in each acquisition step. The problem is framed in an exploration-exploitation framework by combining an embedding based on Uniform Manifold Approximation to model representativeness with entropy as uncertainty measure to model informativeness. We applied our proposed method to the autonomous driving datasets CamVid and Cityscapes and performed a quantitative comparison with state-of-the-art baselines. We find that our active learning method achieves better performance compared to previous methods.